
Compliant Cat Robot
Conventional bio-inspired legged robots with rigid structures and stiff joints rely on complicated control strategies to adapting variable unknown environments. Most of them are so fragile that a minor collision may result in catastrophic damage.
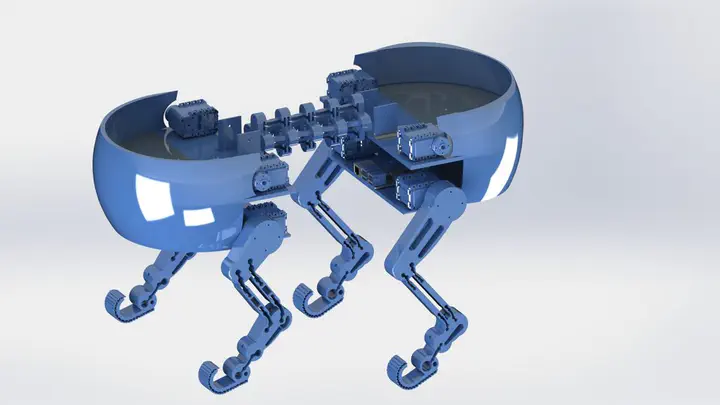
The aim of this project is to develop a compliant quadruped robot in a form of wild cat with compliant mechanism design and fabrication that can achieve robust terrain manoeuvrability, survivability, and energy efficiency. This is to leverage on the rapid advancement in the 3D printing and other novel rapid prototyping technologies to achieve complex and multi-functional structures, and the in-depth understanding of animal locomotion and biomechanics and neuro-sensory-motor control.