
Flexible Lizard Robot
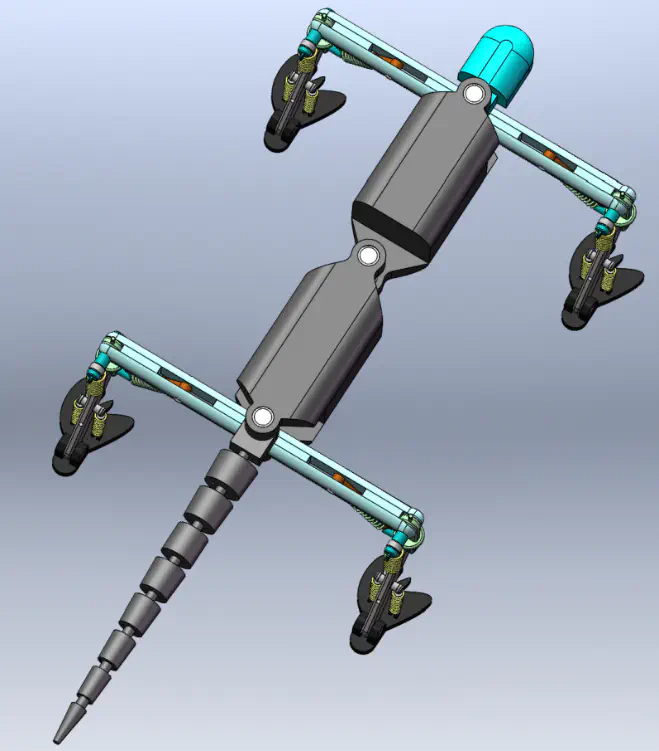
Many physical biological properties can be used to improve bio-inspired robot design. In this project, we aim to investigate the effects of compliant and flexible trunks on improving the performance of legged robots. We developed a bio-inspired lizard robot with a flexible and compliant trunk, which can mimic the basic crawling gait pattern of lizards. Simulations and experiments demonstrated that the lizard-inspired crawling robot with a compliant and flexible trunk exhibited significantly reduced peak-power. More interestingly, we found that the stiffness of the trunk and the motion frequency are two key variables affecting the reduction rate of the peak-power.