
Conveying the sensation of gravity for virtual objects through haptic feedback
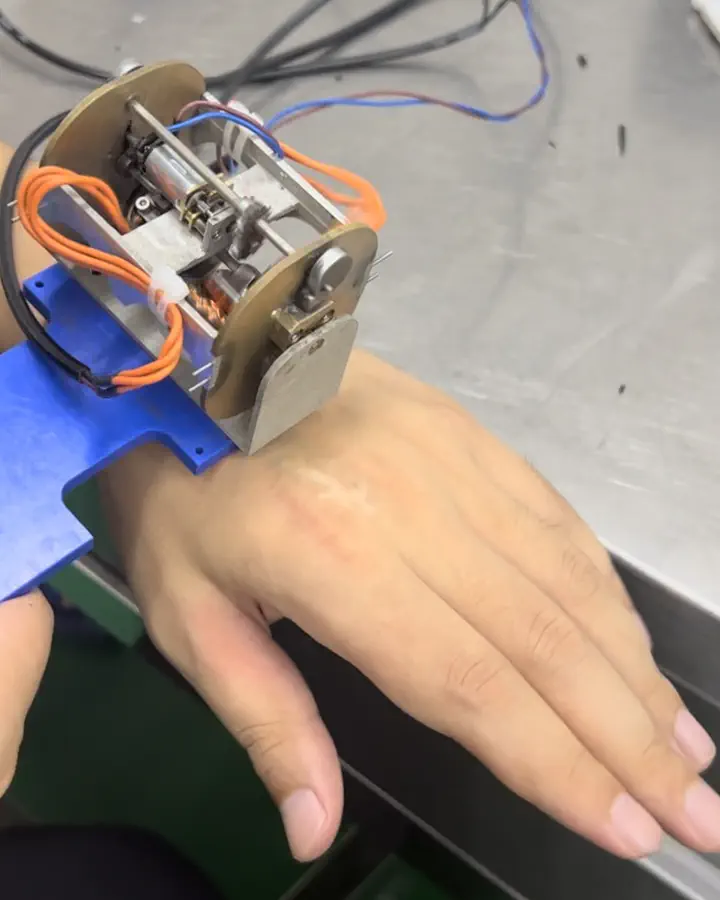
This study explores conveying the sensation of gravity for virtual objects through haptic feedback. Enhancing the immersive experience for VR users by accurately representing mass properties poses a significant challenge. Our wearable adopts the concept of the gyro effect to induce torque on the back of the hand. Since continuous torque application isn’t feasible, we employ high-frequency asymmetric motion to influence human perception. The wearable no longer requires specific hand gestures, such as grasping, to simulate an object’s gravity, setting it apart from previous studies. In essence, our device enables free-hand configuration. The torque also naturally aligns with the actual gravity direction using a gimbal design. Experimental results demonstrate the device’s ability to replicate the sensation of a virtual object weighing around 1.5kg while itself weighing less than 300g. Although challenges like excessive vibration and prolonged fatigue during device use are still being addressed, this study introduces a novel approach to solving the issue of gravity sensation for a more immersive experience.