
Novel Compliant Actuator Design
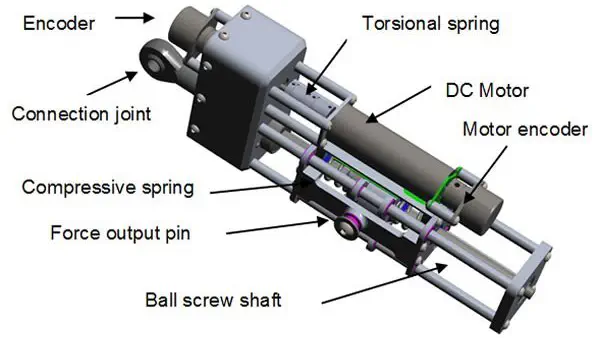
We developed a novel compliant actuator for rehabilitation robotics based on Series Elastic Actuator (SEA) design. Our design overcomes the key limitations faced by the current compliant actuator design, such as low force control fidelity and low high force control bandwidth. The novel use of two stages of spring in the low speed and high speed range improves the intrinsic compliance of the robot, making the robot safer for human, and in the same time improves the control bandwidth and robot control. The actuator is also more compact and lightweight than other compliant actuators with the same power.