
Ultrasound Image-Guided Robotic Biopsy System
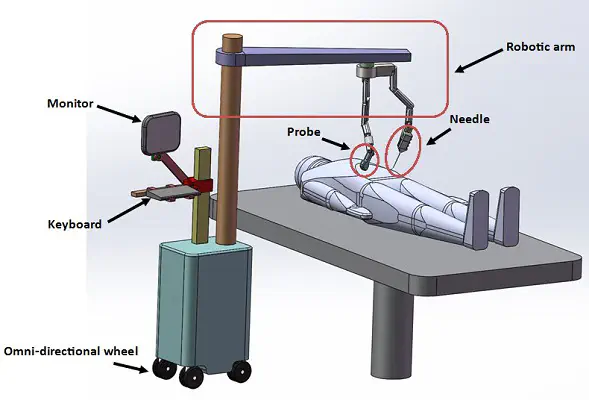
Ultrasound image-guided liver biopsy has been a hot research topic for a long time. Due to the low-price and real-time imaging properties of ultrasound, this procedure has been widely applied in hospitals all over the world. However, for long, it still has not been well developed mainly because of the problems related to liver motion induced by human respiration. The liver is not rigid nor directly accessible, hence precisely tracking the target area of biopsy is always difficult even under the help of real-time ultrasound image guide, such that testing objects are keenly needed and of vital importance for this kind of research. Our research, with tested data on a novel dynamic liver phantom, an unique ultrasound image guided robotic biopsy system, and novel image processing algorithms, provides solutions to this problem.