
Autonomous BIM-ready Drone System for Building Facades Inspection
Due to recent spate of incidents involving falling concrete, more frequent building inspections for external facades will need to be carried out. Building facades need to be regularly inspected and maintained to ensure any façade attachments remain intact and do not fall off, and thus pose a potential hazard to people and properties below. However, inspection of the building façade is challenging and the problem is further aggravated by the complexity of the façade element and increasing building height.
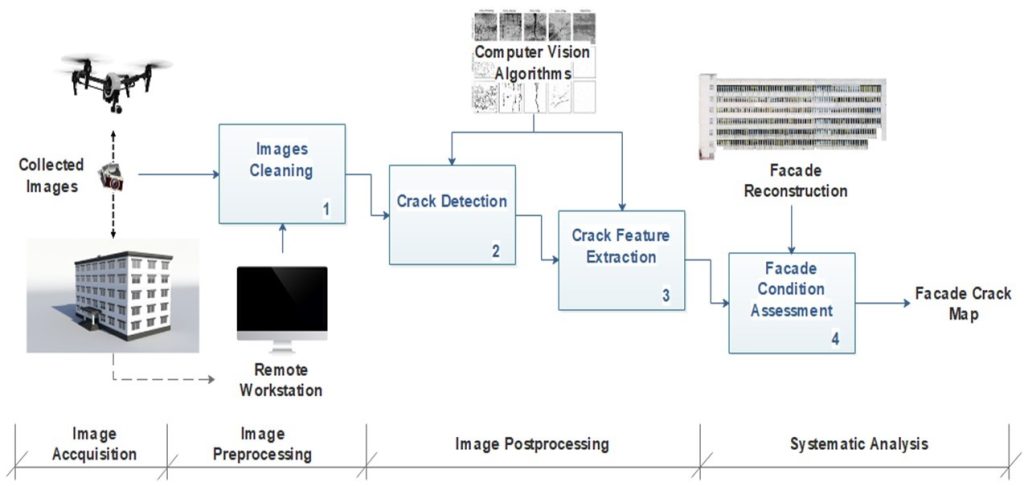
The overall objective of the project is to develop a smart drone inspection system using advanced image-capturing drones with an integrated software platform, artificial intelligence to enhance effectiveness of performing building façade inspection and to drive automation. The solution involves drones outfitted with appropriate data acquisition equipment, including high resolution cameras and infrared cameras. A supporting software platform which includes both a mobile app and a computer application are developed to identify and detect defects.
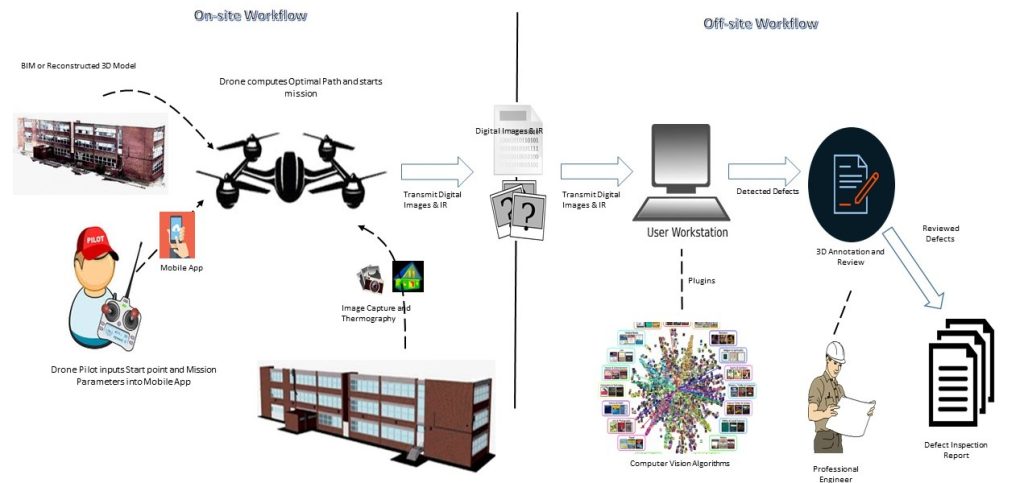
This project proposes the creation of an autonomous aerial platform for building facade inspection. This platform combines two complementary technologies in image processing based building defect detection and identification, as well as an automatic drone flight path planner and automated flight control.
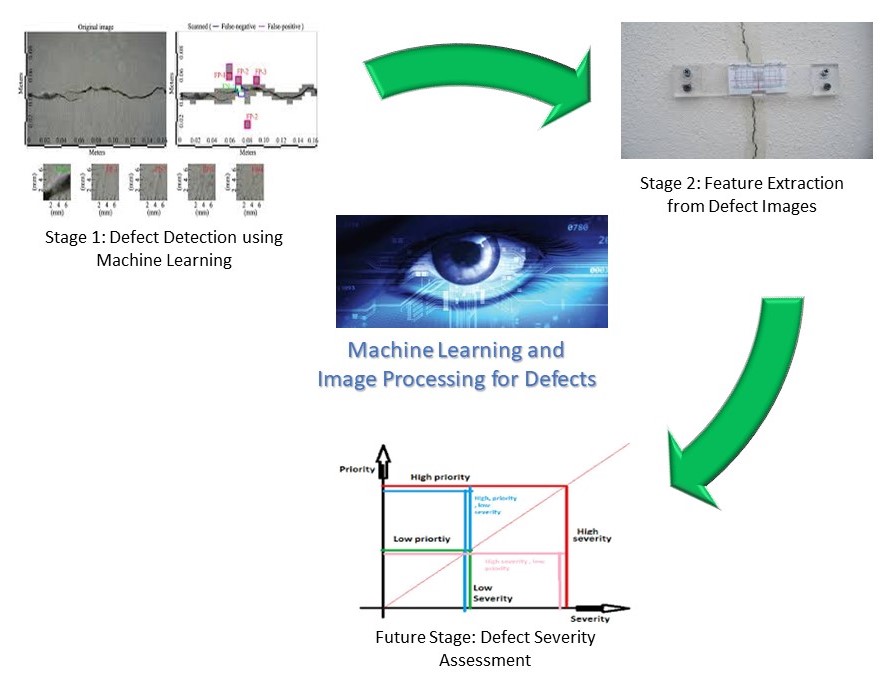
The first technology utilizes advanced machine learning and image processing techniques, e.g. convolutional neural networks, to identify images with cracks, spalling, efflorescence and delamination in concrete. Further feature extraction is carried out to determine various defect characteristics like crack width, crack length, area of spalling etc. Currently, most feature extraction techniques require some reference measurement or physical scale to also be captured in the image. However, this is not practical in the context of high-rise residential HDB buildings due to the unavailability of access. Hence, a non-contact method will be devised to measure the defect features.
The second technology involves automatic drone flight path planner to provide the waypoints and camera orientation while taking into consideration non-safe fly regions because of obstruction from trees and confined spaces. Optimal path-planning algorithm is included to maximize the drone’s limited flight operation time over the building façade, while ensuring the imaging requirements needed to support the façade inspection process is adhered to. The automated flight control permits the drone to move along the path while automatically acquiring the images of the façade.
The above technologies will be part of an integrated platform that collates the building images, and subsequently reconstructs a 3D model. For reporting purposes, the system will geo-locate the defect image in the 3D model. This 3D model may refer to the reconstructed 3D, or an existing building information model (BIM).
We believe that adopting our proposed approach will lead to the following outcomes:
- Improved inspection efficiency and productivity i.e. more accurate and consistent inspection results
- Increased inspection coverage of high-rise buildings and complex façade systems
- Reduced safety risk to inspection personnel
- Time savings
For more details, please contact:
Prof Chua Kim Huat, David
Email: ceedavid@nus.edu.sg