

Roboscan: surgical tools inspection and sorting system
In healthcare institutions, the Central Sterile Supplies Department (CSSD) handles the reprocessing of surgical instruments, including disinfection, cleaning, inspection, and packaging to ensure sterility. Most tasks are still performed manually, requiring significant time and labour, and exposing workers to infection risks. With increasing demand on Singapore’s public hospitals, improving CSSD efficiency has become critical.
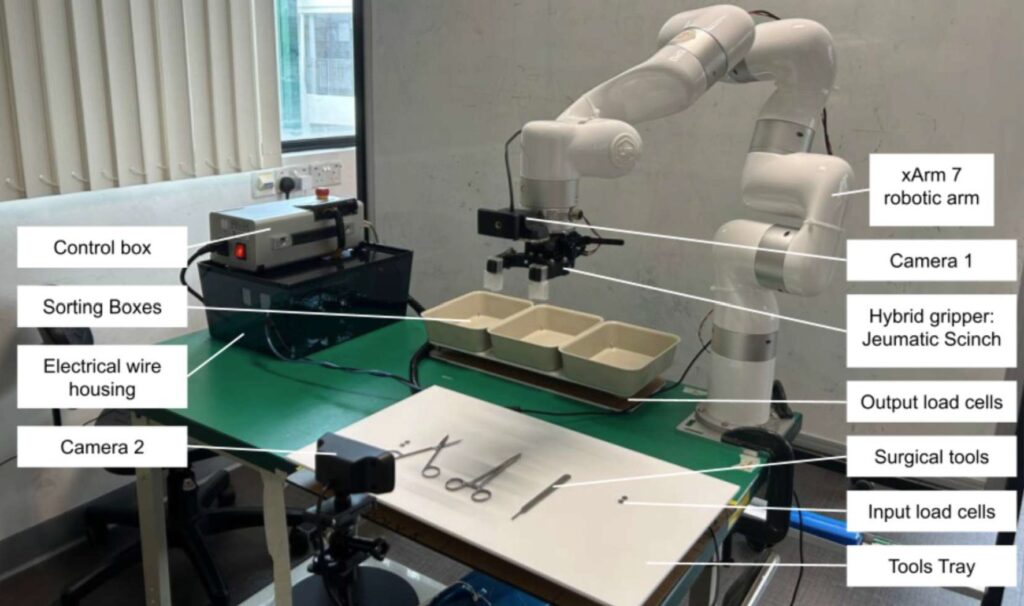
Our novel integrated system, Roboscan, offers a solution by automating the inspection and sorting of sterilised surgical tools, enhancing both safety and productivity. It comprises the following features:
- A robot gripping system to ensure precise, secure handling of surgical tools while minimising damage to them
- AI models to accurately identify tool types and locations while inspecting for stains
- Sensors and controls that allow the system to evaluate tools and the environment while coordinating actions across components
The novel aspects of our solution include the following:
- Robotic arm with tailored end effector for optimised for handling surgical tools, seamlessly integrating with off-the-shelf robotic arms
- High-performance computer vision for automated classification and defect detection, ensuring precise and consistent tool inspection
- Fully autonomous system that eliminates the need for human intervention and provides the ability to function continuously

Project Team
Students:
- Chee Hock Chuan, Matthew (Engineering Science, Class of 2026)
- Huang Wanqi (Electrical Engineering, Class of 2027)
- Joey Lee Leyi (Computer Science, Class of 2026)
- Srinivasan Udhaya (Biomedical Engineering, Class of 2026)
Supervisors:
- A/Prof Lim Li Hong Idris (lhi.lim@nus.edu.sg)
- Dr Elliot Law (elliot.law@nus.edu.sg)
- Mr Nicholas Chew (nickchew@nus.edu.sg)