

FIDbot: An autonomous robot for construction quality checks for floors
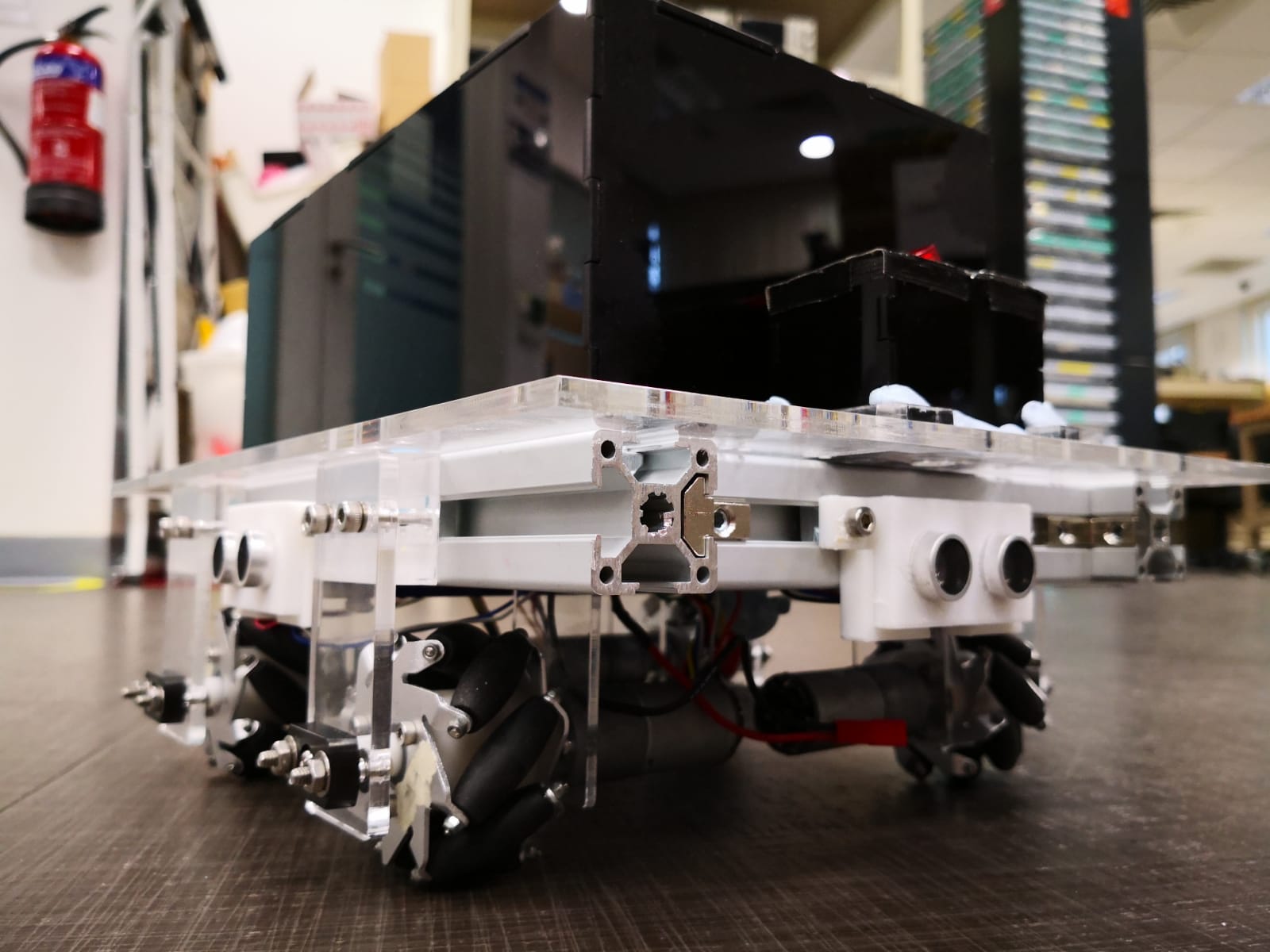
Perspective view of FIDbot
Project Motivation
Construction quality checks are a key aspect of the civil engineering industry to ensure that all works have been completed in a satisfactory manner prior to commencement of occupation or operation of a structure. In Singapore, these checks are performed based on the Construction Quality Assessment System (CONQUAS) set by the Building and Construction Authority (BCA). However, such checks are typically manpower intensive, laborious, and rely on human judgement which may lead to errors and inconsistencies.
In line with BCA’s push for industry players to adopt innovative technologies to improve construction productivity, this project explored the use of automation for construction quality checks. In particular, the project focused on reducing manpower and improving quality of checks for floor evenness and fall which is a key component in CONQUAS.
Design
The FIDbot is robot that is designed to perform checks for floor evenness and fall in an autonomous manner. The solution comprises a sensor package which can measure floor inclination in two orthogonal directions with an accuracy of up to 0.01 degrees. It is mounted on an autonomous platform that can move across a floor area in a grid-like manner in order to measure the floor inclination at various points. A distinguishing feature of the robot is its ability to change its direction of motion without having to rotate through the use of mecanum wheels. This allows the data from the sensor package to be visualized more easily as no transformation between local axes of the robot and global axes of the floor is required. The robot has an on-board data processing and storage system which records the floor inclination data from various points and the corresponding location of each point. The solution also includes a visualization tool that is designed to display the inspection results in an intuitive manner.
Weighing less than 10 kg and measuring less than the area of a typical floor tile, the robot is designed to be portable and only needs to be operated by one person. The user can simply place the robot at the starting corner of a floor, switches it on with a flick of a switch, and is free to perform other tasks while the robot operates autonomously. Once the robot has completed its mission, the user can retrieve the data which can be visualized using a computer. The visualization tool is designed to flag out regions of the floor that are insufficiently level for a dry area and regions that have inadequate fall for a wet area which could lead to ponding.
Awards
- Faculty of Engineering Innovation & Research Award 2019 (Gold)
- Outstanding Undergraduate Researcher Prize 2019
Project Team
Students:
- Chan Zi Jun Gregory (Mechanical Engineering, Class of 2019)
- Lee Yeow Chung, Xavier (Civil Engineering, Class of 2019)
- Tan Shan Leong (Mechanical Engineering, Class of 2019)
Supervisors: