

Poseidon: An autonomous solution for watering plants in nurseries
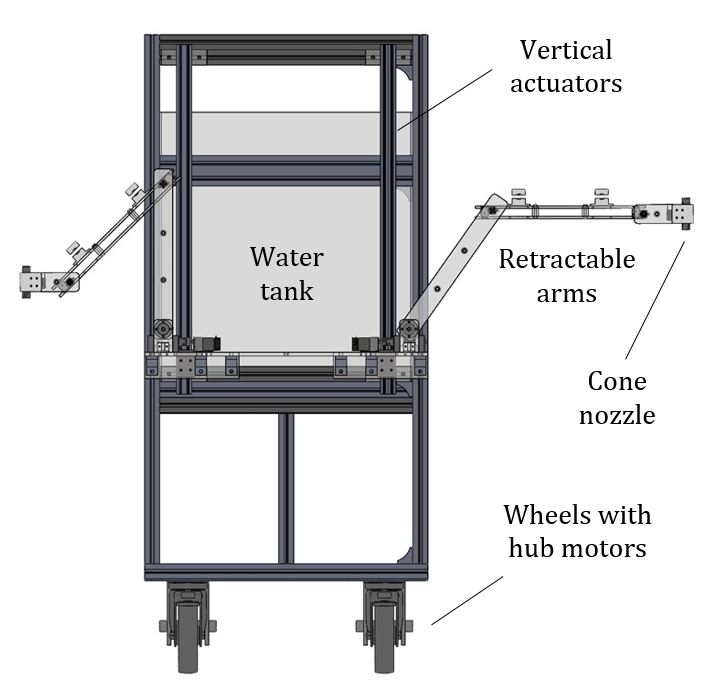
Key components of Poseidon

Test at client's nursery
Project Motivation
Horticulture is a labour-intensive industry as it requires careful and rigorous maintenance of plants that are grown for various purposes. While many conventional technologies have been developed to improve the efficiency of horticultural operations, they may not be as effective as they could be. This could be due to the design of such systems which operate on a mass scale and hence are hard to customise for specific plots or even individual plants.
In this project, our industry client is keen to develop a robotic solution for the purpose of watering the plants in their nursery. The client desires to increase their operational efficiency by reducing man-hours spend on simpler tasks such as watering by 30% so that the horticulture team has more time to focus on more specialised tasks such as pruning.
Design
The Poseidon is robot that is designed to water plants in the client’s nursery in an autonomous manner. It is built to operate in their various shade houses where smaller potted plants are arranged on benches that are arranged in a parallel rows while larger plants are placed in a similar manner on the ground. The robot is designed with localization and navigation systems that allow it to cover each shade house following a predetermined path. As it moves between the rows of plants, the robot waters the plants on either or both sides in a targeted manner using a pair of retractable arms which are equipped with 120-degree cone nozzles. The arms are also able to move in the vertical direction to cater to plants of different heights.
The chassis of the robot is made of aluminium extrusion bars and designed to support the total weight of the robot which is about 250 kg. The drive system comprises a pair of hub motors at the back of the robot that has an operating speed of 0.15 m/s and a pair of swivel wheels at the front. This wheel arrangement allows the robot to have minimum turning radius and hence enables it to manoeuvre more easily in tight spaces.
The robot is equipped with a 200-litre tank and a pump with flow rate of up to 17 litres per minute and pressure of 2.5 bar. It is powered by a 24 V, 13 Ah battery which is sufficient for the robot to cover an area of 130 m2 in a single charge.
Project Team
Students:
- Cheng Yong Quan (Computer Engineering, Class of 2019)
- Nur Farzana Binte Mohammed Saini (Mechanical Engineering, Class of 2019)
Supervisors:
- Elliot Law (elliot.law@nus.edu.sg)
- Hozefa S/O Husainee
- Loh Ai Poh (elelohap@nus.edu.sg)