Automation & Robotics Studio #2
In this industrial automation studio, students will tackle real-world challenges faced by various industry partners. One of the primary issues centers around a 3PL (third-party logistics) company aiming to streamline its packaging processes. The company seeks customisable packaging automation solutions to handle the increasing complexity of varied order sizes and materials. Students will address the challenge of developing flexible systems that can efficiently adapt to different packaging requirements while optimizing speed, accuracy, and cost-effectiveness. Another significant problem comes from an urban farming company focused on automating its vertical farming systems. The challenge here lies in designing automation equipment that optimizes plant growth, resource management, and maintenance, while also being scalable and sustainable.
In addition, a cobot (collaborative robot) distributor seeks to enhance its cobot offerings by testing niche end-effector designs for fatigue and stress resistance. Students will need to develop a robust testing framework to evaluate the performance and durability of these designs under various operating conditions, ensuring that the cobots are reliable and safe for industrial use. Lastly, NUS RoboMaster-related projects will also be held in this studio but will only be extended to current competition team members.
Project supervisors:
- Mr Nicholas Chew (nickchew@nus.edu.sg)
- Mr Soh Eng Keng (ek.soh@nus.edu.sg)
- Dr Aleksandar Kostadinov (aleks_id@nus.edu.sg)
Studio timeslot in Semester 2 AY2024/2025:
- Thursday 1 pm to 4 pm @ iDP Studio 4 (E2A-03-03)
Automated product feeder design for robotic kit assembly
Project partner: CEVA Logistics
During packing operations, the product volumes are so consequent that saving time on a single operation can allow the whole process to gain huge efficiency. Manually pushing carton boxes onto a conveyor belt is time-consuming and can be automated. Our project aims at bringing a new design to make our automated kitting process more efficient. The proposed system should automate product placement onto the conveyor belt (which transports them to a robotic arm performing the kitting).

Kitting automation design for soft packaging or boxed items
Project partner: CEVA Logistics
Soft packaging
A large amount of beauty products are sold in kits, bundled within a single flexible plastic bag. However, the manual process of assembling these kits is very repetitive and prone to inefficiencies. To address this problem, we propose to automate the packaging process. Our project aims to enhance the speed, consistency, and overall performance of beauty kit assembly.
Boxed items
The current kitting process requires an operator to feed 8 lanes of products on a conveyor. The products will flow all the way to a second operator who is controlling a gate with his foot to regulate the product flow. This second operator inserts the 8 products at the same time in a single carton box by sliding them.Our project aims to bring a new design to make the kitting process more efficient. The proposed system should automate products placement into the kit box and get rid of the conveyor to save space.

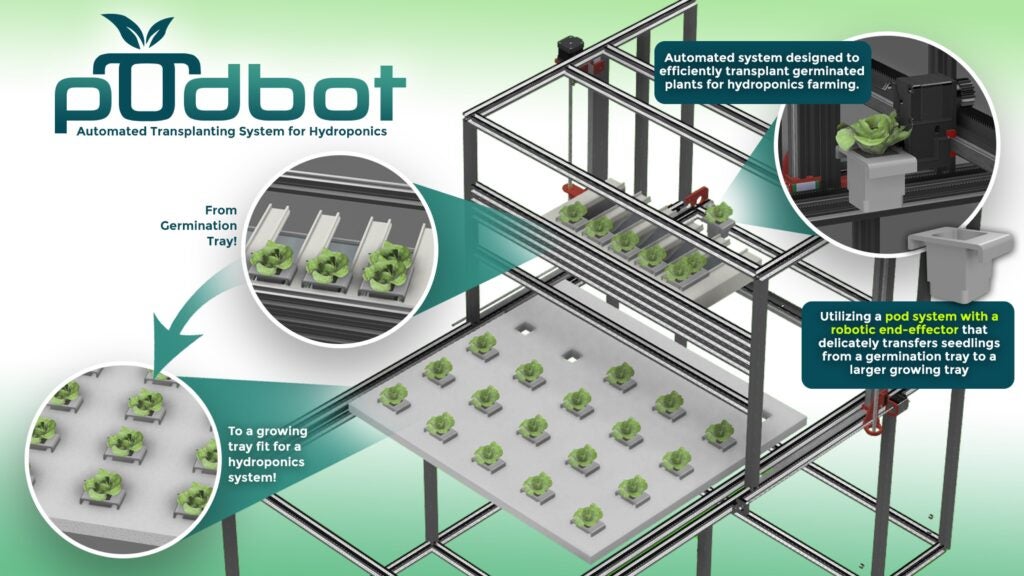
Automated transplanting or seedling system for hydroponics
Project partner: Arianetech Pte Ltd
This project will continue from the existing PODbot designed by previous batch of students. The aim is to develop automated system to efficient transplant germinated plants for hydroponics farming. The main challenges revolve around the utilization of pod-system and a robotic end effector in order to delicately transfer germinated seedlings from a tray to a larger hydroponics growing environment.