Application of soft robotics in aerial manipulation
The use of conventional robotic arms on aerial drones is challenging because of their weight and the high precision needed to grip objects effectively. However, aerial manipulators made of soft robotics can bridge this gap as they are flexible, lightweight, and energy efficient. Such manipulators can enable tasks such as pick-and-place to be performed at high altitudes.
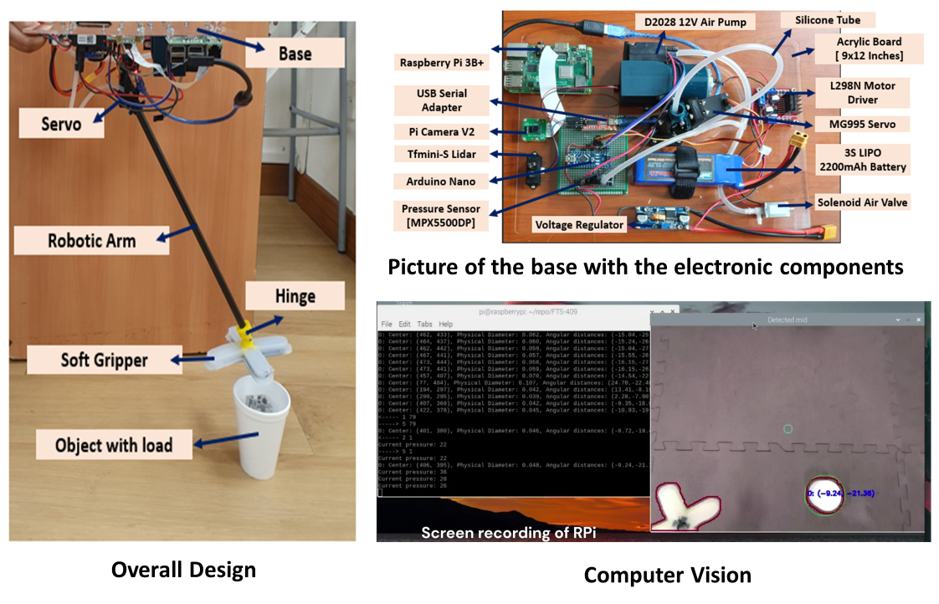
This project explores the design of an aerial manipulator comprising a base, robotic arm, and soft gripper which can be attached to conventional drones. The soft gripper is made of silicone rubber and is pneumatically actuated. The manipulator uses computer vision to help detect objects for the soft gripper to grab and place at desired locations.

Project Team
Students:
- Rumesh Sudhaharan (Mechanical Engineering, Class of 2023)
- Stuti Rastogi (Mechanical Engineering, Class of 2023)
Supervisor:
- Sutthiphong Srigrarom (spot.srigrarom@nus.edu.sg), Temasek Laboratories