

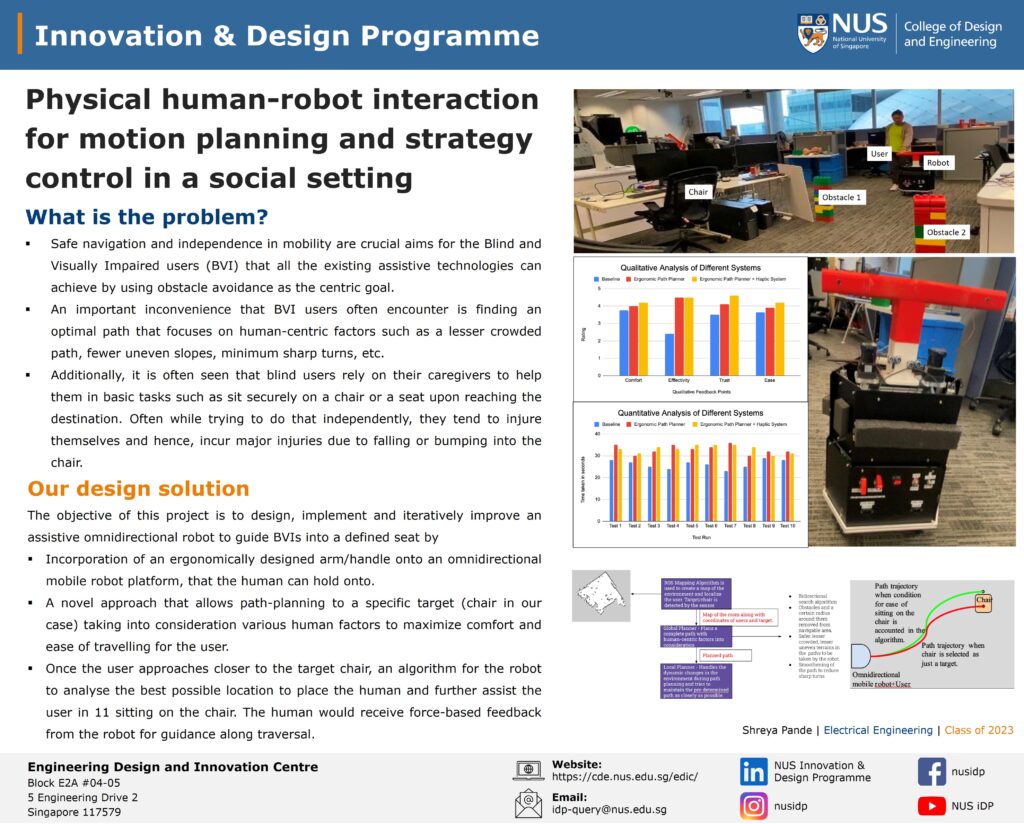
Physical human-robot interaction for motion planning and strategy control in a social setting

Safe navigation and independence in mobility are crucial aims for blind and visually impaired (BVI) users that all existing assistive technologies can achieve by using obstacle avoidance as the central goal. However, this approach is unable to find optimal paths that consider human-centric factors such as a lesser crowds, fewer uneven slopes, and minimum sharp turns. Additionally, BVI users often rely on caregivers to help them with basic tasks such as sitting securely on a chair upon reaching a destination as they could otherwise fall or bump into the chair.
The objective of this project is to design, implement, and iteratively improve an assistive omnidirectional robot to guide BVI users into a defined seat by: (1) incorporation of an ergonomically-designed arm/handle onto an omnidirectional mobile robot platform for a user to hold onto; (2) a novel approach that allows path-planning to a specific target taking into consideration various human factors to maximise comfort and ease of travelling for the user; and (3) an algorithm for the robot to analyse the best possible location to place the user and further assist the user in sitting on the chair.
Project Team
Student:
- Shreya Pande (Electrical Engineering, Class of 2023)
Supervisor:
- Michael Chuah and Wu Yan (A*STAR)
