Collision avoidance of robot manipulator
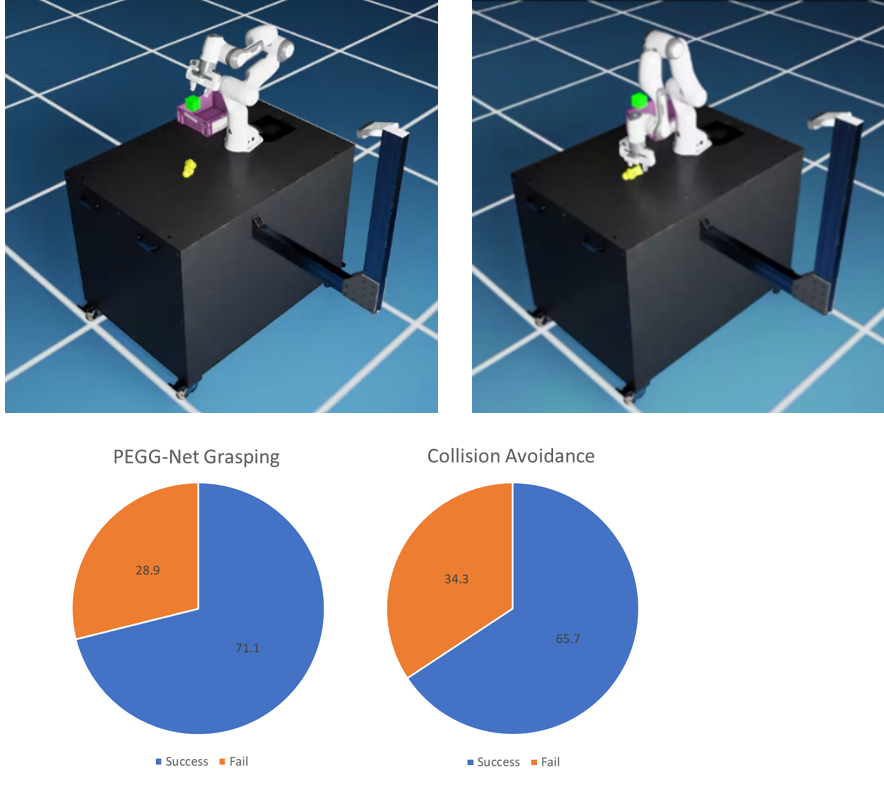
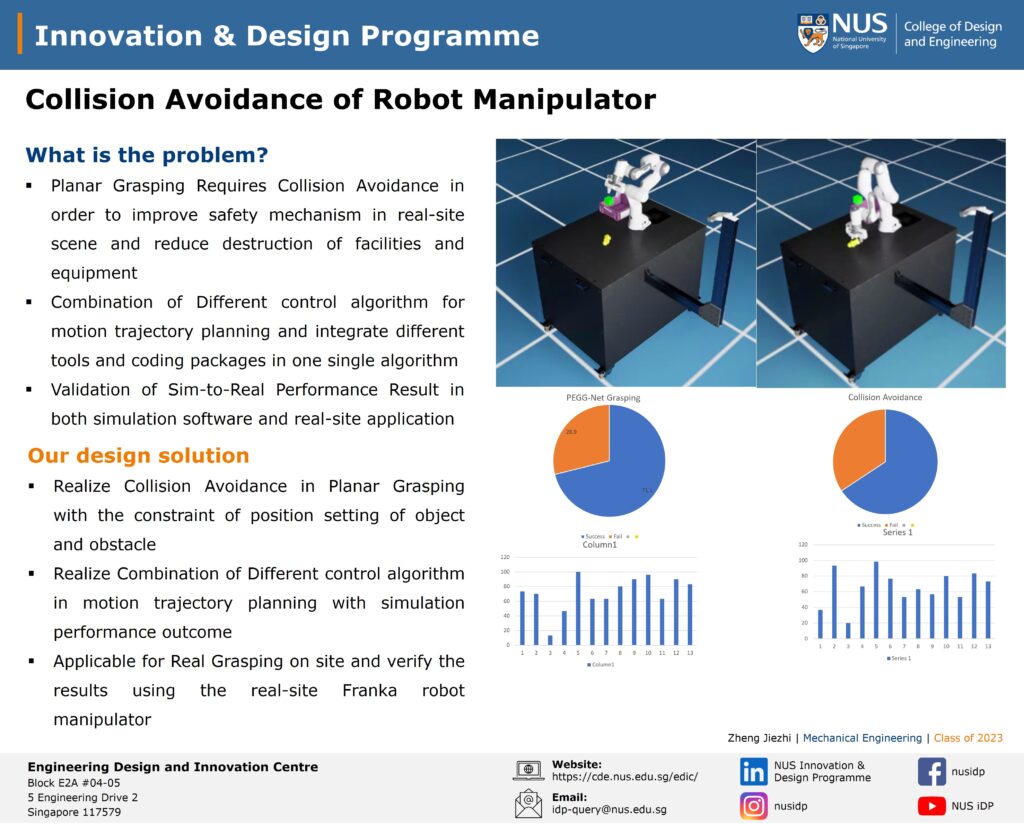
Planar grasping requires collision avoidance in order to improve safety in real-site conditions and reduce damage to facilities and equipment. This project explores a solution that combines different control algorithms for motion trajectory planning and integrates different tools and coding packages in one single algorithm. Validation of the solution is conducted in a simulation environment and verified physically using a Franka robot manipulator.
Project Team
Student:
- Zheng Jiezhi (Mechanical Engineering, Class of 2023)
Supervisor:
- Marcelo H Ang Jr (mpeangh@nus.edu.sg)