

Robotics adapti-sync application framework
Robots are increasingly used for many different applications such as delivery, cleaning, security, and concierge. However, each robotic solution vendor has their own platform for managing their robots. This makes it challenging for end users to integrate the deployment of robots from different vendors in an effective and seamless manner. Moreover, there is also the need to enable robots to operate in a coordinated manner with existing lifts and doors in buildings, and manage interactions in a high-traffic environment.
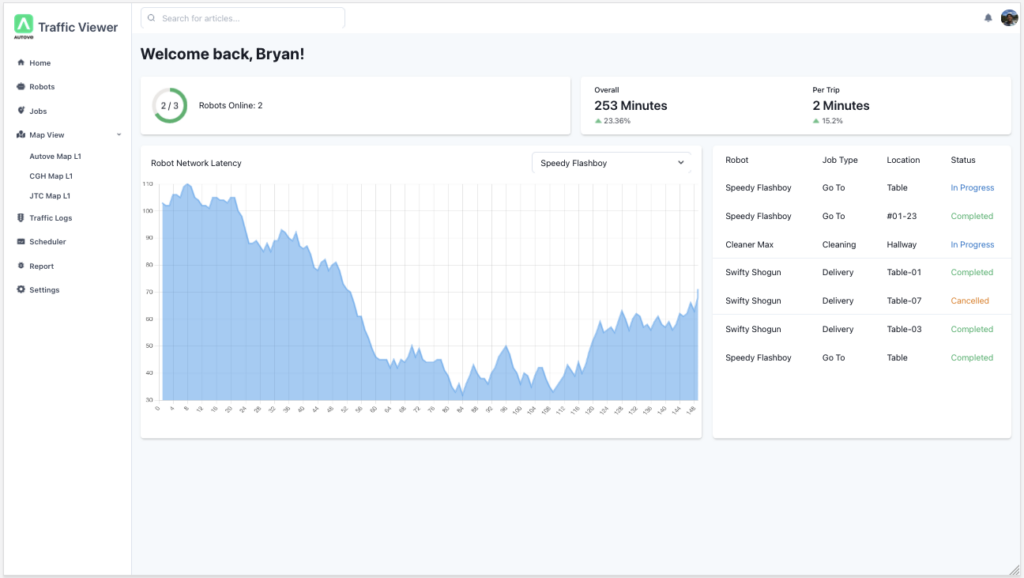
This project aims to solve the lack of fleet controllers for commercially available robots to work in a high human traffic shared workspace by creating a traffic controller that is different from the traditional method of fleet controller where the path can be pre-planned for robots to work in a controlled environment. The solution comprises a robot-to-platform adapter, a control and command dashboard, a traffic trajectory planner, and a traffic entity manager.

Project Team
Student:
- Bryan Tee Pak Hong (Computer Science, Class of 2024)