

UROP projects for AY2025/2026
We welcome all students from the College of Design and Engineering to work on ad-hoc projects under CDE2605 Undergraduate Research Opportunities Programme (UROP). We have a diverse range of projects that are offered by our faculty members and industry partners. They are grouped into a number of broad themes below.
Students may work on these projects for one or two semesters either as individuals or with a team of other students. CDE2605 can be used to partially fulfil the compulsory internship requirement for students in Engineering majors.
Find out more below about the projects that are offered for Semester 1 AY2025/2026 and/or Semester 2 AY2025/2026. Contact the projects supervisors and copy idp-query@nus.edu.sg if you are interested to sign up.
Innovating for Better Healthcare
Projects in this theme aim to design better solutions to meet healthcare needs in hospitals and the community. Students learn from and work closely with healthcare professionals and academic staff to conceptualise, design, test, and develop healthcare and medical technologies.
Project supervisors: Dr Wu Changsheng (cwu@nus.edu.sg), Dr Yen Shih Cheng (shihcheng@nus.edu.sg)
This project requires students to have certain knowledge in circuit design/hardware fabrication/industrial design or software skills in embedded coding or app development. Also, this project will be in collaboration with SGH and clinicians, so we hope that students can be committed to meeting timeline and milestones.
Project supervisor: A/Prof Lim Li Hong Idris (lhi.lim@nus.edu.sg)
In this project, you will learn to develop the following key features in the design and development of an automated exoskeleton for rehabilitation.
1. Robotic and motor systems:
- High-precision motors and actuators with feedback systems to adjust the force and speed of movements in real-time.
2. Sensor integration:
- Sensors to monitor the user’s movements, provide data for real-time adjustments and track physiological data.
3. Control systems:
- User-friendly interfaces to control and customise the exoskeleton’s functions.
- AI algorithms to analyse data and adapt the rehabilitation programme based on the user’s progress.
4. Power supply:
- Efficient and long-lasting batteries to ensure the exoskeleton can be used for extended periods without frequent recharging.
- Consideration of weight and placement of batteries to maintain balance and comfort.
You will have the opportunity to work with a mechanical engineering student and an industry partner.
Project supervisors: Dr Wu Changsheng (cwu@nus.edu.sg), Dr Yen Shih Cheng (shihcheng@nus.edu.sg)
Heat stress and exertional heat illness (EHI) are significant health concerns, particularly in physically demanding environments such as military training, sports, and outdoor labour. Prolonged exposure to heat, combined with high-intensity activity, can lead to heat exhaustion, heat stroke, and dehydration, which may cause severe health complications or even fatalities. The most accurate way to assess EHI risk is through core body temperature measurement, but current methods are either invasive or limited in accuracy when using single-site non-invasive sensors. A more comprehensive and real-time monitoring solution is essential for improving heat stress management. This project will develop a multimodal multi-site (MMMS) wearable sensor network that integrates wireless, miniaturized sensors to measure core body temperature, skin temperature, heart rate, and gait variability across multiple body regions. By leveraging sensor fusion and real-time data processing, this system will enhance the accuracy of heat strain assessment, enabling early intervention and personalized risk prediction for individuals exposed to extreme heat conditions.
This project requires students to have certain knowledge in circuit design/hardware fabrication/industrial design or software skills in embedded coding/app development/data analysis. Also, this project will be in collaboration with clinicians, so we hope that students can be committed to meeting timeline and milestones.
Project supervisors: Mr Sim Zhi Min (zmsim@nus.edu.sg)
Industry partner/collaborator: Behavioural and Implementation Science Interventions (BISI), Yong Loo Lin School of Medicine
Different devices and systems are slowly incorporating AI into their systems. This however presents challenges for clinicians and engineers hoping to fine tune AI models for the future. Students will work on standard healthcare protocols and middleware systems that will help interface hardware to software, and integrate novel AI technologies to aid clinical decision making.
Project supervisor: A/Prof Lim Li Hong Idris (lhi.lim@nus.edu.sg)
Designing exoskeletons for rehabilitation involves several key considerations to ensure they are effective, safe, and user-friendly. In this project, you will learn to consider the following key features in your design.
1. Ergonomics and comfort:
- The exoskeleton must be designed to fit various body types and sizes comfortably.
- Lightweight materials like carbon fiber or aluminium are often used to reduce fatigue during use.
2. Mobility and range of motion:
- The device should support natural movement patterns, allowing for a full range of motion in joints.
- Adjustable components can help tailor the fit and function to individual needs.
3. Safety features:
- Incorporating sensors to detect and prevent unsafe movements or excessive strain.
- Emergency stop mechanisms to quickly disable the device if needed.
The student is encouraged to practise the engineering design process and will have the opportunity to consult with an industry partner.
Project supervisor: Dr Tang Kok Zuea (kz.tang@nus.edu.sg)
Industry partner/collaborator: National Dental Centre of Singapore (NDCS)
The handling and sorting of dental burs is an essential yet time-consuming task in clinical settings. In the context of Singapore, all dental clinics utilize manual handling and sorting of dental burs. However, Meng et al. has pointed out that it is a time costing work, which may cause errors in classification. Meanwhile, surgical instruments are relatively sharp and have infectious substances like bloodstains and biological tissues. To address these challenges, AI vision-based handling using a robotic handler and vibratory feeding offer a potential automated solution to minimize human intervention.
Project supervisors: Dr Wu Changsheng (cwu@nus.edu.sg), Dr Yen Shih Cheng (shihcheng@nus.edu.sg)
This project aims to develop an advanced, non-invasive wireless wearable mechano-acoustic (WWMA) sensor system to monitor vocal attributes and gait patterns for the early detection of Mild Cognitive Impairment (MCI). The system will integrate high-sensitivity inertial measurement units with AI-driven signal processing algorithms to extract meaningful biomarkers from real-time speech and movement data. To validate the system, we will collaborate with clinicians to collect data alongside MRI and neuropsychological assessments. This integration ensures real-world validation, bridging engineering innovations with clinical applications for early dementia screening. The project aims to develop a scalable, cost-effective platform for broader community and healthcare deployment.
This project requires students to have certain knowledge in circuit design/hardware fabrication/industrial design/data analysis. Also, this project will be in collaboration with clinicians, so we hope that students can be committed to meeting timeline and milestones.
Innovating for Future Mobility
Projects in this theme aim to design future mobility solutions and novel vehicles to move people and goods faster, and more efficiently, and more comfortably.
Project supervisor: Mr Lim Hong Wee (hongwee@nus.edu.sg)
Industry partner/collaborator: Red Dot Mobility
Red Dot Mobility is a company specializing in electric powertrain customization for E-bikes, buggies and other electric powered mobility devices. They are looking at projects to work on integration of their products to bikes and other mobility devices. Students will get hands on work to design, fabricate, install and test real world components. Exact project scope can be discussed according to the needs of the company and the student's core knowledge.
Project supervisor: Mr Lim Hong Wee (hongwee@nus.edu.sg), A/Prof Ashwin M Khambadkone (eleamk@nus.edu.sg)
The NUS Formula SAE (FSAE) team is looking for an individual wheel dynamometer to test their 80kW race vehicle. Students will need to spec components suitable for the use case and design and prototype the dynamometer. The race car will be used to test the dynamometer. The work involves building electrical circuits, designing the frame, mounting and integration to the race car safely. Work will be distributed according to the core knowledge of the student.
Project supervisor: Mr Lim Hong Wee (hongwee@nus.edu.sg), Mr Kenneth Neo (kenneth@nus.edu.sg)
In collaboration with a start-up pioneering a new era in internal combustion engine (ICE) design, the project entails looking into a bold alternative to the century-old crank-slider mechanism. A design promising a diesel-like torque curve in a compact gasoline package. Students will validate, simulate, and shape this revolution.
Innovating for Smarter Living
Projects in this theme focus on designing smart devices and services to enhance everyday life, work, and play.
Project supervisor: (to be confirmed)
Industry partner/collaborator: TE Connectivity
Problem statement:
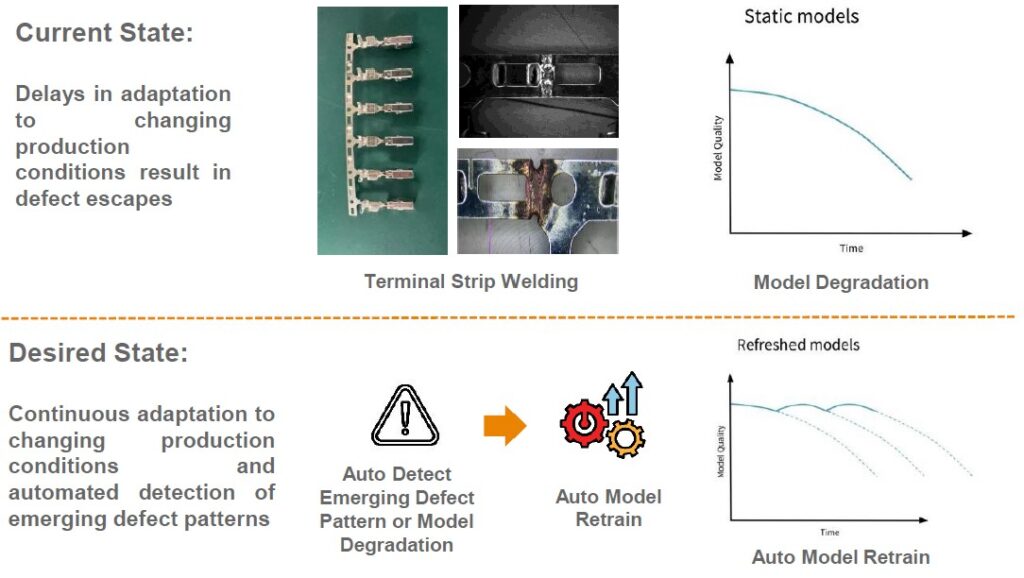
- Manufacturing quality control systems struggle with accurate defect classification.
- Rare defects have limited training examples and are often missed.
- Manual retraining creates delays in detection and adaptation.
Proposed approach:
- Develop high-accuracy welding defect classification system.
- Create monitoring framework for defect pattern analysis.
- Implement automated model retraining pipeline triggered by pattern changes.
- Build visualisation tools for defect trends and system performance.
Potential innovations:
- Continuous learning system and adaptive machine learning architecture that responds to production changes.
- Anomaly detection for emerging defect patterns.
Expected/target benefits:
- Increased detection of rare defects leading to reduced flow out of defective products.
- Faster adaptation to new defect types and continuous improvement of detection accuracy.
Notes:
- Students who take up this project may have the opportunity to be engaged as interns during the project.
- Students who take up this project may be required to go for a site visit of TE Connectivity's manufacturing plant in Suzhou, China to better understand the problem and/or test their solution.
- Students who take up this project are expected to enter their project for the TE AI Cup in 2026.
Project supervisor: (to be confirmed)
Industry partner/collaborator: TE Connectivity
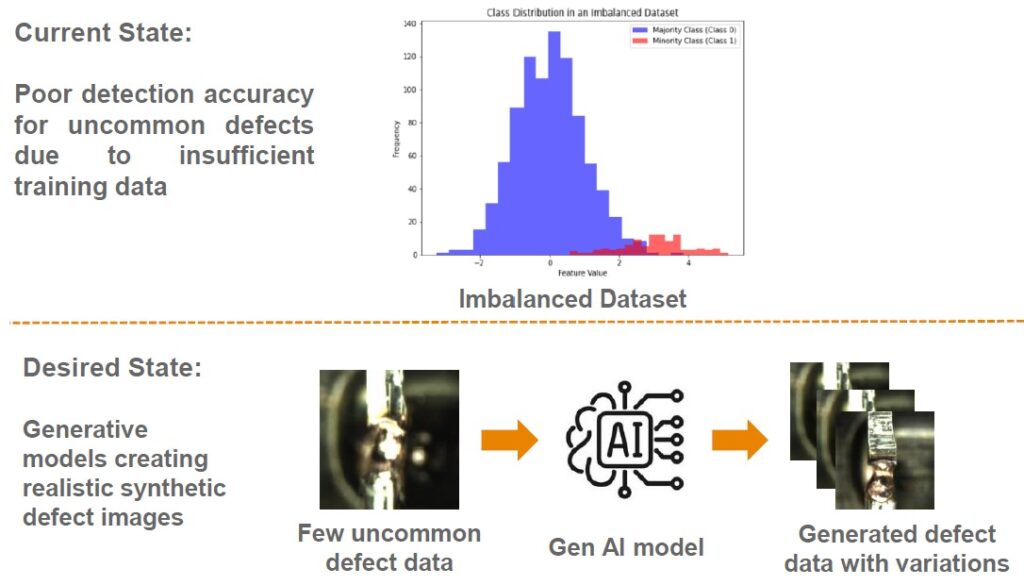
Problem statement:
- AI-based inspection systems require large datasets of defect images.
- Rare defects lack sufficient data for effective training and detection accuracy suffers for uncommon but critical defects.
Proposed approach:
- Develop generative models optimised for manufacturing defect generation with control mechanisms ensuring physical plausibility of different defect types.
- Implement systems to generate variations in orientations, lighting, and severity.
- Design validation methodologies for models trained on synthetic data.
Potential innovations:
- Generative AI with physical constraint mechanisms for realistic defect generation.
- Domain-specific data augmentation techniques.
Expected/target benefits:
- Improved detection of rare but critical defects.
- Balanced training datasets for AI inspection systems resulting in higher overall inspection accuracy.
Notes:
- Students who take up this project may have the opportunity to be engaged as interns during the project.
- Students who take up this project may be required to go for a site visit of TE Connectivity's manufacturing plant in Dongguan, China to better understand the problem and/or test their solution.
- Students who take up this project are expected to enter their project for the TE AI Cup in 2026.
Project supervisor: (to be confirmed)
Industry partner/collaborator: TE Connectivity
Problem statement:
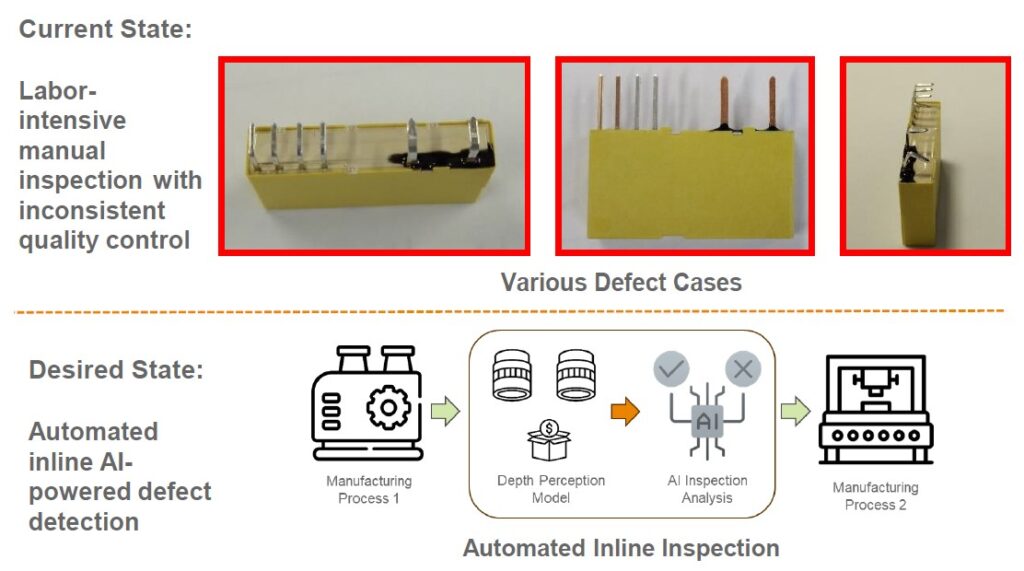
- Manufacturing quality control currently lacks proper inspection capabilities.
- Labour-intensive manual microscope inspection for coil welding and relays is inefficient.
- Human inspection introduces variability and limits production throughput.
Proposed approach:
- Create AI image processing algorithms trained on production samples.
- Implement real-time processing system (>~1.5 seconds per piece).
- Establish a data collection framework that enhances AI model accuracy over time.
Potential innovations:
- Real-world application of computer vision and machine learning.
- High-resolution imaging in vibration-prone manufacturing environments.
Expected/target benefits:
- Increase production throughput.
- Reduce labour costs for manual inspection.
Notes:
- Students who take up this project may have the opportunity to be engaged as interns during the project.
- Students who take up this project may be required to go for a site visit of TE Connectivity's manufacturing plant in Trutnov, Czech Republic to better understand the problem and/or test their solution.
- Students who take up this project are expected to enter their project for the TE AI Cup in 2026.
Project supervisor: A/Prof Mark De Lessio (mdeles@nus.edu.sg)
There is tremendous opportunity in the area of creating front end apps to interface with some of the Large Language Models that enable individuals and/or businesses to interact with them in a manner that adds value to both. I would be very interested in exploring such opportunities with students that may have ideas that fit into this category. The Automated Assessment Creation Tool project is based in the concept of how to fairly assess student comprehension based on the content delivery of the learning environment. The premise is the development of a device/app that can be used to record/scan delivered content and then interface with large LLM’s to automatically create assessments to measure the understanding of the content that has been delivered. There are a number of options to possibly achieve this through variations of AI ranging from doing key word assessment on the digitized content and then automatically determine the best assessment questions selected from a pool of pre-determined questions to actually developing the ability to automate the creation of relevant assessment material/questions based on the digitized content that has been captured. A significant goal is to ensure that the assessment is most closely based on the content that has actually been delivered in the actual classroom during the term.
Project supervisors: Dr Yen Shih Cheng (shihcheng@nus.edu.sg), Mr Graham Zhu (graham.zhu@nus.edu.sg)
Industry partner/collaborator: Bang & Olufsen
With the advent of spatial audio and 3D audio effects, smart speakers now have the ability to use advanced algorithms and audio processing techniques to place sounds in different parts of a room, creating immersive audio landscapes. In addition, by using precise positioning technologies like Ultra-Wideband (UWB) to localise the listener, these immersive experiences can potentially be much more directed and even follow a listener as they move around a room.
In this project, we will work with Bang & Olufsen (who are renowned for creating iconic audio experiences) to explore these and other technologies (e.g. on-device LLM for voice control (https://gektor650.medium.com/audio-transcription-with-openai-whisper-on-raspberry-pi-5-3054c5f75b95), parametric acoustic arrays (https://youtu.be/Fbphhg9ArXw), innovative mechanical designs to reduce discomfort while using headphones, actuating audio transparent materials in the Beosound Shape (https://www.bang-olufsen.com/en/sg/speakers/beosound-shape) to provide visual representations of music (https://youtu.be/VTEOu1p_0OU), etc.) to design and test new listening experiences.

Project supervisor: Dr Gabriel Lipkowitz (gel@nus.edu.sg)
Industry partners/collaborators: Apple
Spatial computing offers the potential to seamlessly blend the digital and physical worlds, opening up opportunities for qualitatively novel user experiences. In the context of physical product design, such technology offers the potential to bridge the divide between digital conceptualization and ideation, and those real-world contexts in which products will be applied by end-users. However, few applications have successfully demonstrated this concept in actual practice due to challenges in designing and developing applications and content for these platforms.
This project will seek to make progress towards realizing this goal by developing applications in the context of the burgeoning, yet still nascent, ecosystem around spatial computing, an industry priority. To do so, students will develop native to the Apple Vision Pro device using the high-level and general-purpose Swift programming language, implementing and drawing upon features such as 3D model interactivity, immersive scene understanding, and real-time simulation and rendering. Students will take specific contexts including but not limited to engineering, architectural design, and product design, and develop software applications to compellingly visualize such products in a user’s spatial environment, in a manner highly sensitive to user interaction and experience. Students will aim to release an app prototype on the Vision Pro App Store, which future work will extend to conduct in-depth human-computer interaction (HCI) studies.
Depending upon the project outcome, students will have the opportunity to pitch their projects to industry partners, potentially including at the Apple Developer Centre in Singapore, along with in the broader Singapore spatial computing development community.

Project supervisors: Mr Kenneth Neo (kenneth@nus.edu.sg) and Mr Lim Hong Wee (hongwee@nus.edu.sg)
The Markforged 3D printer can print with reinforced continuous fiber in their Onyx material. This increases the strength of the component in the direction parallel to the fiber. It is thus important to be able to model the strength using CAE simulations using software like Ansys for design optimisation. Students will conduct ASTM-based experiments on physical printed fiber-reinforced prototypes and create a CAE model.
This project is suitable for students from Materials Science and Engineering and Mechanical Engineering.
Project supervisors: Mr Royston Shieh (shiehtw@nus.edu.sg), A/Prof Loh Wai Lam (mpelohwl@nus.edu.sg)
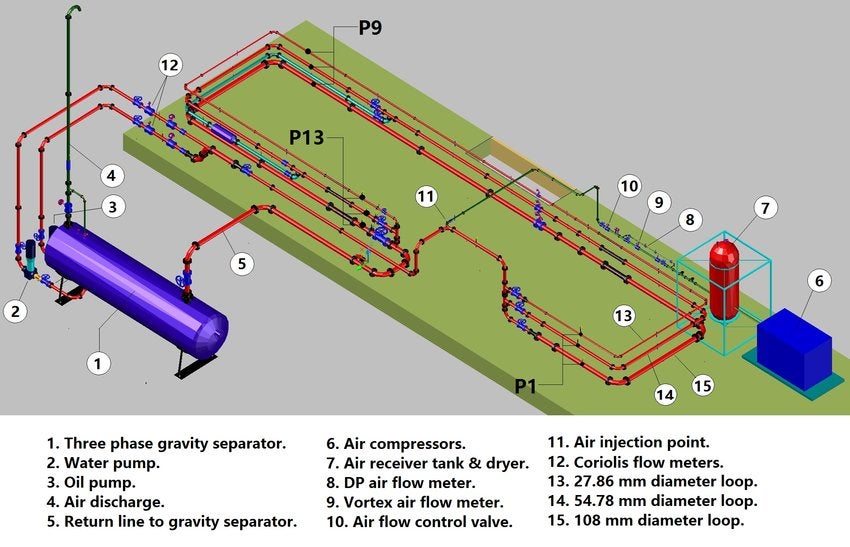
Multiphase flows are commonly encountered in the oil and gas, chemical, and power generation industries. The transition between different flow regimes — such as stratified, slug, annular, or bubbly flow — can lead to complex transient forces acting on the internal surfaces of pipelines and flow equipment. These flow regime-induced forces can result in vibration, fatigue, and failure if not properly understood and mitigated.
This project aims to investigate the hydrodynamic forces generated by different flow regimes in horizontal or near-horizontal pipe segments. Students will employ a combination of Computational Fluid Dynamics (CFD) and experimental methods at the NUS Multiphase Oil-Water-Air Flow Loop Facility to characterise and quantify these forces under varying flow conditions.
This project is suitable for Mechanical, Chemical, and Civil Engineering students who are interested in flow assurance. Students who wish to take up this project should have completed a course in fluid mechanics (e.g. ME2134, ME2135) prior to Year 4.
Project supervisor: A/Prof Mark De Lessio (mdeles@nus.edu.sg)
With rotary telephones tossed on the trash heap of a by gone era the concept of dialling has been replace by most users interfacing via a key pad with their mobile telephones. However, many people struggle with interfacing with their mobile phone in an efficient and quick manner because of the small size of the key pad used. This project proposes researching the availability of a technical solution that can be used to address this issue. For example, would it be possible to incorporate holographic technology or a similar technology to expand the key to enable an easier interface with the key being selected as it is approached by the finger/thumb doing the selection. Perhaps there is an alternative technology that could be incorporated to achieve the same result.
Project supervisors: Dr Aleksandar Kostadinov (aleks_id@nus.edu.sg)
Background
Timely, localized plant health data is critical for reducing input waste and improving crop yields. Biosensors can provide real-time, in-situ monitoring of plant stress, nutrient levels, or disease, yet their integration into field systems remains underdeveloped.
Aims
To explore, design, and test low-cost biosensor concepts for detecting key plant health indicators (e.g., soil, water, and ambient properties; plant health; pest and pathogen presence).
Methodology
This research-oriented project will involve a survey of current biosensor technologies, selection of target biomarkers, and conceptual design of sensor units. Depending on scope, lab testing or simulation of sensing mechanisms may be conducted. Collaboration with researchers from various departments within NUS will be encouraged in which existing technologies can be used for further development.
Deliverables
- Technology review
- Biosensor design concepts
- Proof-of-concept setup (lab or simulation-based)
- Feasibility analysis
- Research paper-style report and showcase poster
Note:
The proposed topic, methods, and deliverables are tentative and intended as a starting point. Depending on the team’s size, interests, and strengths, both the direction of the project (research or development) and its specific outputs (hardware, software, principles) can be adapted accordingly. Students are encouraged to explore related avenues if they find them more compelling.
To support this process, a selection of handbooks and manuals is provided to help kickstart research and frame initial explorations:
Project supervisor: A/Prof Mark De Lessio (mdeles@nus.edu.sg)
There is tremendous opportunity in the area of creating front end apps to interface with some of the Large Language Models that enable individuals and/or businesses to interact with them in a manner that adds value to both. I would be very interested in exploring such opportunities with students that may have ideas that fit into this category. The “Smart Advisor Tool” consists of a front end tool that assist individuals to assess what their personal interest are and how that might correlate to the best degree programs that would enable them to realize these interests as working adults. This would essentially leverage AI to categorize their interests, identify relevant degree programs, identify the types of jobs available to individuals with similar interests, identify the best universities that offer such programs and eventually even perhaps the organizations that have such jobs available. There would be many ways to monetize such a tool including working with Universities to advertise their programs and/or partnering with job placement agencies or even with organizations themselves to push potential candidates to them that have already been vetted and matched with positions they currently are seeking to fill.
Innovating for Sustainable Cities
Projects in this theme delve into the challenges of urbanisation and sustainability. They focus on improving liveability in the urban environment and management of limited resources such as water, energy, and land in an efficient and sustainable manner.
Project supervisor: A/Prof Lim Li Hong Idris (lhi.lim@nus.edu.sg)
Membrane distillation (MD) is a thermally driven separation process where a hydrophobic membrane allows vapor to pass through while blocking liquid water. This technique is particularly useful for desalination and wastewater treatment. The driving force for MD is the vapor pressure difference across the membrane, which is typically achieved by maintaining a temperature gradient between the feed and permeate sides.
One of the main challenges in MD is the high energy requirement due to the need for significant temperature differences, which can be met through concentrated solar heat. In this project, you will learn the principles of concentrated solar heat, assess the current types of hydrophobic membranes and the existing challenges. With this knowledge, you will be able to derive the technical specifications and generate concepts for a renewable thermal system for membrane distillation. You will have the opportunity to work with an industry partner in this project.
Project supervisor: Dr Aleksandar Kostadinov (aleks_id@nus.edu.sg)
Background
Conventional greenhouses often fail in hot, humid regions due to overheating and poor ventilation. Tropical climates demand alternative protected cultivation systems that are low-cost, passive, and context-adapted.
Aims
To design a climate-responsive protected cultivation system optimized for tropical agricultural use, balancing thermal regulation, airflow, and crop protection.
Methodology
The team will begin with contextual research on tropical agriculture and climate data. Design exploration will consider materials, passive ventilation, shading, and modularity. Prototyping may focus on scale models or digital simulations (e.g. CFD for airflow). Stakeholder input may be gathered from local growers or AgriTech solution developers.
Deliverables
- Climate and user needs analysis
- Design proposals (sketches, models)
- Prototype (physical or digital)
- Performance simulation/validation
- Design report and showcase poster
Note:
The proposed topic, methods, and deliverables are tentative and intended as a starting point. Depending on the team’s size, interests, and strengths, both the direction of the project (research or development) and its specific outputs (hardware, software, principles) can be adapted accordingly. Students are encouraged to explore related avenues if they find them more compelling.
To support this process, a selection of handbooks and manuals is provided to help kickstart research and frame initial explorations:
Project supervisor: Dr Tang Kok Zuea (kz.tang@nus.edu.sg)
Industry partner/collaborator: 800 Super
There are many different scheduling tools available to perform waste removal in a city environment. Customised and built-in solutions are costly and not easily reconfigurable. In this project, sustainable solution to optimise a fleet of waste truck is to be developed.
Innovating with Immersive Reality
Projects in this theme aim to develop novel applications of virtual reality and augmented reality to serve the unmet needs in industry verticals such as healthcare, education and entertainment.
Project supervisor: A/Prof Khoo Eng Tat (etkhoo@nus.edu.sg)
Industry partner/collaborator: NUS Faculty of Dentistry
Effective communication is crucial in dentistry for patient care and treatment success. However, many dentistry students face challenges in developing communication skills due to limited opportunities for practice with real patients. To address this, we propose the development of an AI Simulated Patient system tailored for dentistry student communication training. This project integrates emerging technologies including generative AI (Gen-AI), Large Language Models (LLM), and Virtual Reality (VR) to create realistic simulated patient interactions.
Students in this project may design and develop one or more of the following scopes:
- Utilise Gen-AI to create realistic virtual patient scenarios based on diverse demographic profiles, dental conditions, and communication challenges commonly encountered in clinical practice.
- Implement LLM to enable natural language processing for realistic and contextually appropriate dialogue between students and virtual patients.
- Integrate VR technology to provide an immersive environment where students can engage in simulated patient consultations.
- User study and analytics/assessment of students’ learning.
The project will be supervised by Associate Professor Khoo Eng Tat and supported by the research fellow and engineers from the Immersive Reality Lab. It will be carried out in collaboration with Associate Professor Wong Mun Loke from the NUS Faculty of Dentistry. Example of immersive reality (VR/MR) and generative AI (Gen-AI) student projects completed under Immersive Reality Lab can be found on the website https://cde.nus.edu.sg/edic/projects/innovating-with-immersive-reality/.
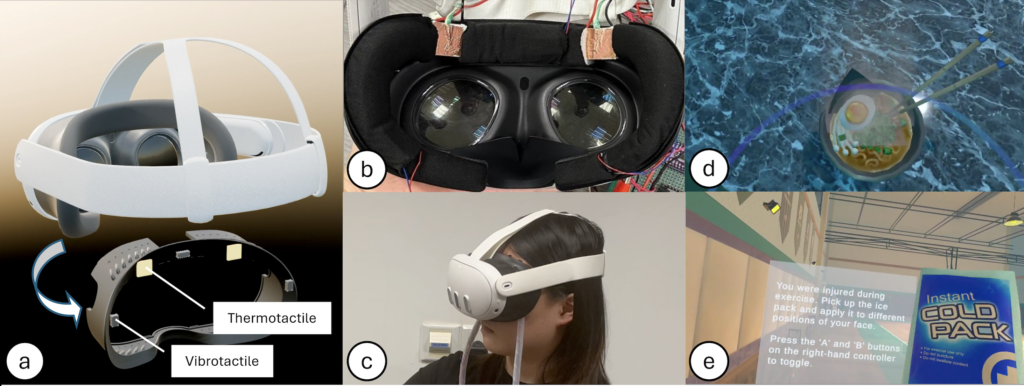
Project supervisor: Dr Cai Shaoyu (shaoyucai@nus.edu.sg)
In this project, you will explore sensory augmentation via haptic feedback on the face and nose, focusing on smell augmentation, while investigating the effects of smell modification illusion through temperature feedback in psychological experiments.
Project supervisor: Dr Cai Shaoyu (shaoyucai@nus.edu.sg)
In this project, you will develop a pneumatic-based haptic interface system that generates vibrotactile stimuli within the human-perceivable frequency range to enhance tactile texture perception of physical material surfaces.
Project supervisor: A/Prof Khoo Eng Tat (etkhoo@nus.edu.sg)
This project is dedicated to pushing the boundaries of immersive technologies, generative AI, and large language models (LLMs). Students can explore how these technologies can be integrated to transform VR/AR simulation systems used in sectors like medical education, aviation training, and elderly care. Students will investigate the current limitations of immersive systems, design novel solutions to enhance realism, interactivity, and usability, and pioneer new use cases. A key emphasis will be placed on user experience (UX) design, real-time AI-driven feedback, and human-AI interaction.
Students joining this project will have the flexibility to either select from a curated list of project topics or propose their own ideas that align with the studio’s themes. Under the guidance of A/Prof Khoo Eng Tat and the Immersive Reality Lab team, students will work closely with industry partners to develop real-world solutions that innovate beyond today's capabilities.
Proposed areas of exploration:
- VR/AR applications for medical, nursing, and aviation training
- Simulating realistic AI-driven virtual characters using GenAI and LLMs
- Auto-feedback and skill assessment systems powered by GenAI in healthcare training
- Computer vision and machine learning for object detection, tracking, and 3D reconstruction
- Simulating and sensing emotions in virtual human interactions
Problem statements (students may choose or propose their own):
- Virtual Paediatric (Infant) Patient Simulation — Create an immersive VR experience for training in pediatric emergencies, focusing on respiratory distress scenarios. (Collaboration with Centre for Healthcare Simulation)
- AI Social Companion Robot/Pet for Elderly — Design a virtual or physical AI companion for emotional support and engagement of elderly individuals. (Collaboration with NUS Nursing)
- AI Co-Pilot in VR Simulator for Pilot Competency Training — Integrate an AI-driven virtual co-pilot to enhance decision-making and skill development in pilot training simulators. (Collaboration with Singapore Airlines-NUS Digital Aviation Corp Lab)
- Emerging Applications of GenAI and VR/MR — Students propose a novel idea combining GenAI, VR, and MR technologies to solve a real-world challenge or create a new experience.
Project supervisor: Dr Tang Kok Zuea (kz.tang@nus.edu.sg)
Industry partner/collaborator: Singapore Eye Research Institute, Singapore National Eye Centre
Gaze tracking and speech recognition will be incorporated on a VR platform to capture users’ inputs in a medical setting. Such functions will aid the doctors to diagnosis patients’ conditions in several medical settings like emergency medicine and triaging.
Project supervisor: A/Prof Khoo Eng Tat (etkhoo@nus.edu.sg)
Advancements in full-body motion sensing and generative AI are opening new frontiers in the art and science of dance. Traditional dance practice often relies on repetitive rehearsals and instructor feedback, but dancers face challenges in achieving precise technique refinement and exploring creative movement variations.
This project aims to create an innovative system that integrates VR-based immersive full-body tracking with Generative AI-driven choreography. The goal is to empower dancers to train anywhere, receive real-time, AI-guided feedback, and collaborate with AI to generate new, optimized choreography. By blending immersive reality and creative AI generation, the project envisions a future where human dancers and AI co-create, enhance technical mastery, and expand artistic boundaries.
We will collaborate with student dance groups to collect real-world motion data and evaluate the system's impact on choreography development and learning outcomes.
Students participating in this project can choose to contribute to one or more areas, including:
- Full-Body Pose Estimation: Develop real-time motion tracking models using VR devices (e.g., VR controllers, body sensors) to accurately capture dance movements.
- Generative AI for Choreography: Apply GenAI techniques to create, modify, and optimize dance sequences based on sensed body motions, proposing novel movement patterns and variations.
- Immersive VR Environment Design: Build VR spaces where dancers can interact with AI-generated feedback, practice performances, and experiment with choreographic ideas.
- User Research and Evaluation: Design and conduct user studies to assess how AI-assisted choreography impacts movement quality, creativity, technical refinement, and the dancer’s learning experience.
Project supervisor: A/Prof Khoo Eng Tat (etkhoo@nus.edu.sg)
Industry partner/collaborator: NUS Alice Lee Centre for Nursing Studies
A study by Goodman et al. (2023) demonstrated that the accuracy and completeness of generative artificial intelligence (Gen-AI) chatbot responses to diverse medical question types and difficulties were rated high by physicians. Integrating Gen AI and virtual reality (VR) simulations in nursing education have tremendous potential of enhancing clinical reasoning and interprofessional communication skills for the nursing students. These technologies provide immersive, realistic, and scalable training solutions that bridge the gap between classroom learning and real-world clinical practice.
Students in this project will design and develop Gen-AI agents and multiusers VR simulation to improve nursing students’ clinical reasoning and interprofessional communication skills. User study will be employed to test the feasibility of the Gen-AI powered VR simulation. Accuracy and ethical aspects of Gen-AI may also be explored, including strategy on fine tuning LLMs with nursing domain specific content.
The project will be supervised by Associate Professor Khoo Eng Tat and supported by the research fellow and engineers from the Immersive Reality Lab. It will be carried out in collaboration with Professor Liaw Sok Ying from the Alice Lee Centre for Nursing Studies (NUS Nursing), NUS Yong Loo Lin School of Medicine. Example of immersive reality (VR/MR) and generative AI (Gen-AI) student projects completed under Immersive Reality Lab can be found on the website https://cde.nus.edu.sg/edic/projects/innovating-with-immersive-reality/.
Project supervisor: A/Prof Khoo Eng Tat (etkhoo@nus.edu.sg)
As human-AI interaction becomes more pervasive in industries such as healthcare, customer service, and aviation, the ability for AI agents to simulate and respond to human emotions will be critical for realism, effectiveness, and empathy. This project, Generative AI Human, explores the creation of AI-driven virtual agents capable of both simulating human-like emotional expressions (e.g., anger, frustration, compassion) and detecting the emotional states of users to adapt their responses accordingly.
Students will work on two intertwined challenges:
Simulating emotions in AI agents
Develop intelligent agents that can generate nuanced emotional behaviours, such as anger or impatience, critical for realistic training scenarios (e.g., angry customer simulations for service training, distressed patient simulations for medical training). This includes voice tone modulation, facial expression animation, and contextual behaviour adaptation using generative AI and LLM-based techniques.
Emotional detection and feedback loop
Implement systems capable of detecting user emotions through computer vision (facial recognition), audio analysis (speech tone/sentiment), or physiological data. These insights can be fed back into the agent’s behaviour to create a dynamic two-way emotional interaction.
Students will have the opportunity to contribute to both technical development (e.g., building emotion models, integrating sensing technology) and user experience design (e.g., ensuring the interaction feels natural and realistic). Applications range from customer service training simulations to healthcare communication skills education.
Possible areas of focus (students may specialize based on interest):
- Emotion simulation using LLMs and multimodal generative AI (text, voice, and facial synthesis)
- Computer vision and audio analysis for real-time emotion detection
- Real-time adaptation of agent behaviour based on detected emotional cues
- User studies to evaluate realism, effectiveness, and user experience of emotional agents
- Ethics and bias mitigation in emotional AI systems
Potential use cases:
- Customer service training: Simulating angry or dissatisfied customers for roleplay-based training.
- Healthcare communication training: Simulating distressed patients or anxious family members for doctors and nurses.
- Aviation crew training: Simulating emotional passenger interactions for cabin crew practice.
- Elderly care support: Creating empathetic AI companions that detect loneliness or sadness.
Project supervisor: A/Prof Khoo Eng Tat (etkhoo@nus.edu.sg)
Industry partner/collaborator: NUS Yong Loo Lin School of Medicine
This project aims to revolutionize obstetrics and gynaecology (O&G) childbirth delivery training using immersive simulation by transforming how medical professionals learn and acquire competency in birth delivery procedures. Our innovative Virtual Reality (VR) and Mixed Reality (MR) Birth Delivery Training platform offers an unparalleled opportunity for medical students to immerse themselves in realistic and interactive simulations of childbirth scenarios.
Students in this project will design and develop new training scenario for O&G doctors, medical students, mid-wives and nursing students. Students will gain exposure to immersive reality technology and generative AI using large language model to create a dynamic training environment/procedures and AI patient that mirrors real-life obstetric situations. They will carry out research with medical faculty and students, gain hands on experience in VR/MR and generative AI (Gen-AI) development, and perform user study to validate the efficacy of the simulations.
The project will be supervised by Associate Professor Khoo Eng Tat and supported by the research fellow and engineers from the Immersive Reality Lab. It will be carried out in collaboration with Assistant Professor Gosavi Arundhati Tushar from the Department of Obstetrics & Gynaecology, NUS Yong Loo Lin School of Medicine. Example of immersive reality (VR/MR) and generative AI (Gen-AI) student projects completed under Immersive Reality Lab can be found on the website https://cde.nus.edu.sg/edic/projects/innovating-with-immersive-reality/.
Project supervisor: Dr Cai Shaoyu (shaoyucai@nus.edu.sg)
In this project, you will design and develop a small and lightweight wearable olfactory display that heats solid perfume materials (e.g., wax) to emit scents through heating approaches (e.g., Peltier-based heating, Laser-based heating) for precise scent generation of multiple odours.
Project supervisor: Dr Cai Shaoyu (shaoyucai@nus.edu.sg)
In this project, you will design a wearable haptic interface for providing haptic feedback through IoT and smart hardware to build immersive experiences for multi-sensory VR/AR, which incorporates visual, auditory and haptic feedback in specific virtual scenarios.
Innovations in Intelligent Systems
Projects in this theme focus on the design of complex engineering systems and automation for various applications.
Project supervisors: Mr Soh Eng Keng (ek.soh@nus.edu.sg)
Industry partner/collaborator: CEVA Logistics
Background
During packing operations, the product volumes are so consequent that saving time on a single operation can allow the whole process to gain huge efficiency. Manually pushing carton boxes onto a conveyor belt is time-consuming and can be automated.
Our project aims at bringing a new design to make our automated kitting process more efficient. The proposed system should automate product placement onto the conveyor belt (which transports them to a robotic arm performing the kitting).
Project objectives
Create an automated feeder design that will allow operators to load the products by putting a large number of products on a flat surface. The feeder should be able to push the carton boxes by groups (or lines) onto the conveyor belt automatically. The products will then flow to the kitting station equipped with a robotic arm. The objective of this project is to create a working prototype of this design.
Project scope
- Review current similar technologies that are relevant to this specific use case
- Propose and evaluate new design concepts for the automated feeder
- Select the most promising design concept, and prototype and test the proposed solution with real products
- Acquire and analyze data to assess the new design efficiency

Project supervisors: Mr Soh Eng Keng (ek.soh@nus.edu.sg), Mr Keith Tan (keithtcy@nus.edu.sg)
Industry partners/collaborator: Durapower Group
Background
This project is related to the electrode coating process of battery foil of a research lab in Singapore. The first step of the process is mixing of the slurry, after which the slurry is transferred out from the mixer pot, sieved, and placed into a bowl in preparation for the second step, coating. During coating, only a small amount of slurry is transferred onto the feeding tray and the remaining left in the bowl may start to experience changes to its properties (e.g., change in viscosity, settling and agglomeration of particles). These changes may impact the quality and consistency of coating for large volume of coating.
The current process of ensuring consistency of the coating is by stirring the slurry manually throughout the whole coating process, which is tedious and time-consuming. Automation may help to improve the efficiency, consistency and labour cost of the process.
Project objectives
- Understand the electrode fabrication process
- Automate the slurry transfer process from the mixer to the coating machine
The automated slurry mixer must have the following capabilities to ensure consistent coating:
- Dosing capability
- In-situ viscosity monitoring
Project scope
Propose and evaluate new design concepts for recipient/attachment with the following functions:
- Automated mechanical stirring of slurry
- Automated dosing of slurry
- In-situ measurement of viscosity
Select the most promising design concept, and prototype and test the proposed solution.
![]()
Project supervisor: Mr Eugene Ee (wheee@nus.edu.sg), Mr Soh Eng Keng (ek.soh@nus.edu.sg), Dr Goh Shu Ting (elegst@nus.edu.sg)
The CanSat competition is an annual event for university teams to compete in a space related design-build-launch challenge. This project is looking to bring together passionate students to put together a working CanSat that fulfills the competition needs.
In depth competition details can be found in this link: https://cansatcompetition.com/
![]()
Project supervisors A/Prof Lim Li Hong Idris (lhi.lim@nus.edu.sg)
Industry partner/collaborator: Clemvision
This year-long project seeks to achieve the following objectives:
- Conceptualize and Design: Develop the foundational software architecture of an existing all-terrain mobility robot, including the controller and sensors.
- Prototype and Test Mobility Systems: Build and test prototype systems for a range of potential applications.
- Integrate AI for Autonomy: Develop and deploy AI algorithms for autonomous navigation, obstacle avoidance, and environmental analysis. Key functionalities include real-time terrain mapping, adaptive pathfinding, and decision-making in complex scenarios.
- Ensure Communication and Control: Implement IoT-enabled communication protocols for remote monitoring, real-time feedback, and control via centralized platforms.
- Conduct Comprehensive Testing and Refinement: Perform rigorous testing across diverse terrains to validate performance and reliability. Refine design and algorithms based on data-driven insights gathered during testing.

Project supervisor: Dr Cai Shaoyu (shaoyucai@nus.edu.sg)
Industry partner/collaborator: Tan Tock Seng Hospital
The proposed project aims to develop an advanced haptic rendering system designed specifically to simulate precise hand movements encountered during surgical procedures for Da Vinci Surgical Training. By generating realistic force feedback, the system enables novices, such as medical trainees and surgical residents, to accurately perceive tactile sensations associated with various surgical interactions.
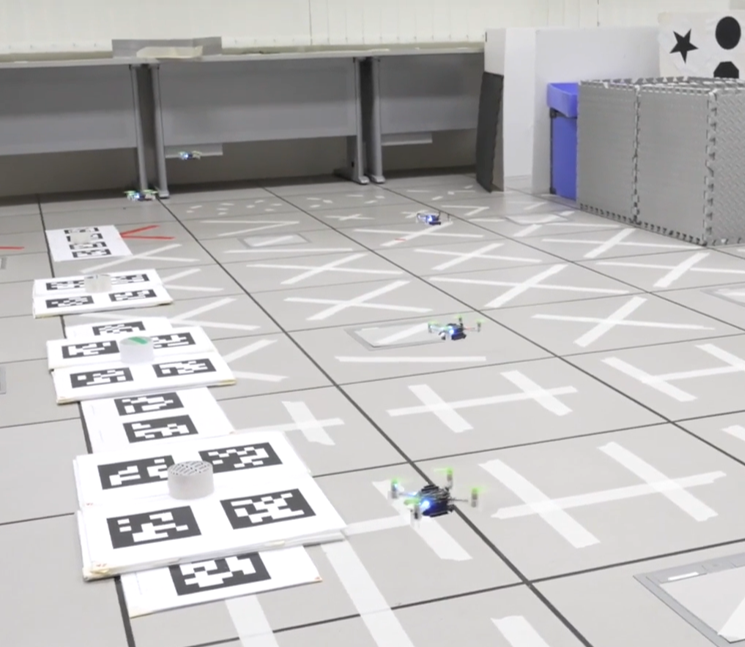
Project supervisor: Dr Elliot Law (elliot.law@nus.edu.sg)
Industry partner/collaborator: Temasek Laboratories, NUS
A swarm of drones is particularly useful for disaster response missions. In addition to being able to operate in hazardous environment, they can also search large areas more quickly and efficiently than a few human rescuers. The goal of this project is to develop and integrate the necessary algorithms to automate a swarm of drones to rapidly and effectively search and locate disaster scenario victims in indoor environment.
The project team will be expected to participate in the 2026 Singapore Amazing Flying Machine Competition (Category E event on Swarm) which will be held sometime in March 2026. Building on the work of previous teams, students in this project will explore state-of-the-art techniques in computer vision, machine learning, and swarm robotics. Students will develop or improve algorithms to optimise the search strategy of the drones and enable them to adapt to the dynamic and unpredictable environment.
The following areas of work will be covered in this project:
- Swarm control and command
- Search strategy
- Localisation
- Collision avoidance and object detection
- Simulation
Project supervisors A/Prof Lim Li Hong Idris (lhi.lim@nus.edu.sg)
This project utilizes Nvidia Omniverse and OpenUSD, combined with a Large Language Model (LLM), to simulate and control a robotic arm. Nvidia Omniverse provides a collaborative platform for real-time 3D simulation, while OpenUSD (Universal Scene Description) offers a robust framework for creating and exchanging complex 3D scenes.
The project involves integrating the LLM to interpret natural language commands, which are then translated into precise control instructions for the robotic arm within the Omniverse environment. This setup allows for realistic simulation of the robotic arm’s movements and interactions in a virtual space before deploying them in the real world.
By leveraging the advanced simulation capabilities of Omniverse and the flexibility of OpenUSD, the project aims to create a highly interactive and intuitive control system. This approach provides a powerful tool for testing and refining robotic behaviors in a safe, virtual environment, facilitating rapid prototyping and testing. You will have the opportunity to work with an industry partner on this project.
Project supervisor: Dr Tang Kok Zuea (kz.tang@nus.edu.sg)
Industry partner/collaborator: Singapore General Hospital
With the rapid adoption of automation in industrial sectors including healthcare, warehousing and manufacturing, there are various solutions that offer integration of lifts and also contactless interfaces for human users and autonomous mobile robots. However, challenge is that there are many different lift models that are installed in buildings, making integration with such solutions difficult. Customised and built-in solutions are costly and not easily reconfigurable. On the other hand, there are also several standards for Automated Mobile Robots (AMRs) to integrate with the lifts. Such communication standards for the AMRs and lifts have to be customised. To address the concerns of the safety issues and the implementation cost and time, we would like to propose an open standard to ‘smart-enable’ lift system so as to facilitate integration with different lift models and AMRs.
Project supervisor: Dr Aleksandar Kostadinov (aleks_id@nus.edu.sg)
Background
Handling delicate plant structures in automated farming systems remains a major challenge. Traditional grippers often damage plants or fail to adapt to varied morphology. Soft robotics offers a promising alternative, but practical deployment is still limited.
Aims
To design, prototype, and evaluate soft-material-based end effectors capable of gently and adaptively handling plants, flowers, or fruits in an agricultural automation context.
Methodology
Research will begin with a review of existing soft robotic grippers and plant handling challenges. The team will explore materials (e.g. silicone, fabric composites), develop design concepts using CAD, and fabricate prototypes via 3D printing and moulding. Testing will focus on grip adaptability, force distribution, and plant safety.
Deliverables
- Literature review summary
- Concept sketches and CAD models
- Functional prototype(s)
- Evaluation results (e.g. force sensors, plant damage analysis)
- Technical report and showcase poster
Note:
The proposed topic, methods, and deliverables are tentative and intended as a starting point. Depending on the team’s size, interests, and strengths, both the direction of the project (research or development) and its specific outputs (hardware, software, principles) can be adapted accordingly. Students are encouraged to explore related avenues if they find them more compelling.
To support this process, a selection of handbooks and manuals is provided to help kickstart research and frame initial explorations:
- Robotics and automation for improving agriculture | John Billingsley |
- Handbook on Soft Robotics | SpringerLink
- Application of Soft Grippers in the Field of Agricultural Harvesting: A Review
- Perceptual Soft End-Effectors for Future Unmanned Agriculture
- Robotic arms in precision agriculture: A comprehensive review of the technologies, applications, challenges, and future prospects - ScienceDirect