

Robotics
Robotic research focuses on the design and development of intelligent robot systems which can be deployed in different environments to replace or assist humans in monotonous tasks or in dangerous environments. In recent years, robotic research also focuses on the construction of human friendly robots, especially for home and service industries. With advancement in technologies, the robotic systems will be able to perceive the environments and act on a given task with capability on par or better than that of humans. A robot may also have the ability to move around in a given environment. Robotic systems may range from industrial robots, humanoid robots, mobile robots, biomimetic robots, flying robot, unmanned vehicles, etc. There are also wearable robotic system such as exoskeleton or assistive device which can be used for rehabilitation and enhancement of humans stamina and strength. In general, robotic systems can be applied to improve productivity, security and also to assist humans in challenging tasks.
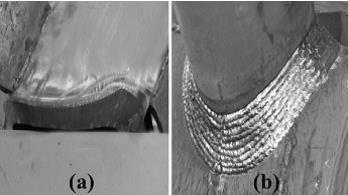
Automatic Welding of Complex Joints with Thick Weld Volume
Fabrication of offshore oil rig structures is typically tedious and labour-intensive. It involves welding numerous joints as shown in the figure and multiple welding passes are necessary due large weld volume. In order to enhance the productivity in the yard, automation of such complex joint welding is highly desirable. This project aims to realise an automated welding system for such task using industrial robot with appropriate sensors.
Chew Chee Meng
Associate Professor
Email: chewcm@nus.edu.sg
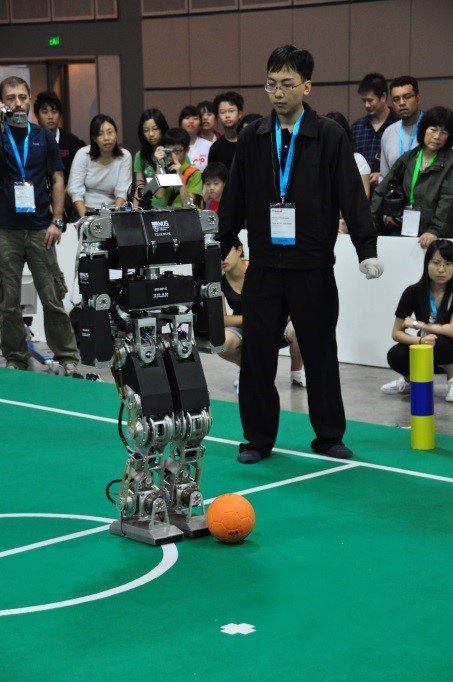
Humanoid Robotics
Humanoid Robots have been successfully demonstrated to walk in level ground and regular steps or slopes. However, it is still a challenge for the robots to walk on uneven terrain. The aim of this research is to design and build bipedal robots that can achieve dynamic walking on both level and rough terrain. Different bipedal walking algorithms will also be developed and verified on our humanoid robot. The focuses are on the robustness and reliability of the overall system.
Chew Chee Meng
Associate Professor
Email: chewcm@nus.edu.sg
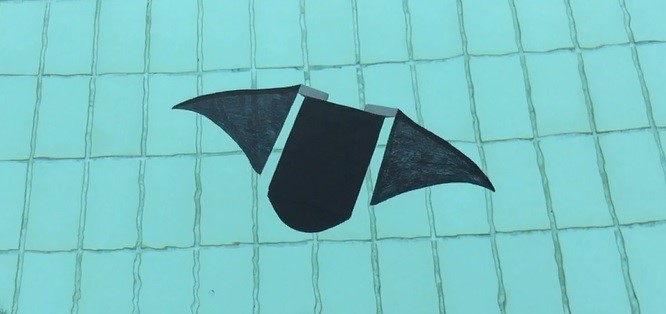
Manta Ray Robot
The manta ray possesses a unique propulsion mechanism as compared with other underwater species. Beside possessing good manoeuvrability, its movement is also fast and efficient. The aim of this project is to develop a full prototype of the robot manta ray. The design will be based on a flexible fin mechanism developed in the lab. The focus will be on the swim efficiency and maneuverability aspect of the platform.
Chew Chee Meng
Associate Professor
Email: chewcm@nus.edu.sg
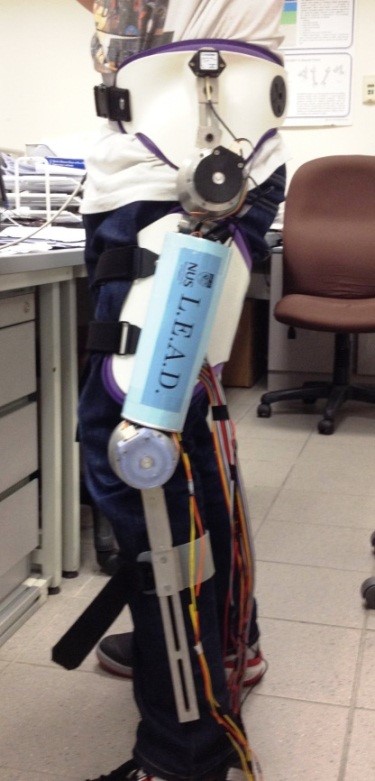
Lower Extremity Assistive Device (LEAD) for Rehabilitation
Walking disability due to stroke typically affects around two thirds of stroke survivors. To assist the patient to regain the walking ability, high intensity and task-oriented interventions after stroke could be given to him immediately after the stroke incident. In recent years, robotic lower extremity assistive devices have been used for gait rehabilitation training of stroke patients with successful outcomes. However, most existing devices are costly and bulky. Hence, their usage is limited in the hospital environment. Due to short hospital stay, most patients are not able to access to the hospital equipment regularly after they have been discharged. This may result in the patient being unable to achieve high level recovery due to the low access rate of the hospital equipment. Hence, there is a need of low cost home-based rehabilitation system for the patients to continue their rehabilitation at home. This has motivated us to develop low cost, light-weight and wearable lower extremity assistive device for home based gait rehabilitation.

Chew Chee Meng
Associate Professor
Email: chewcm@nus.edu.sg
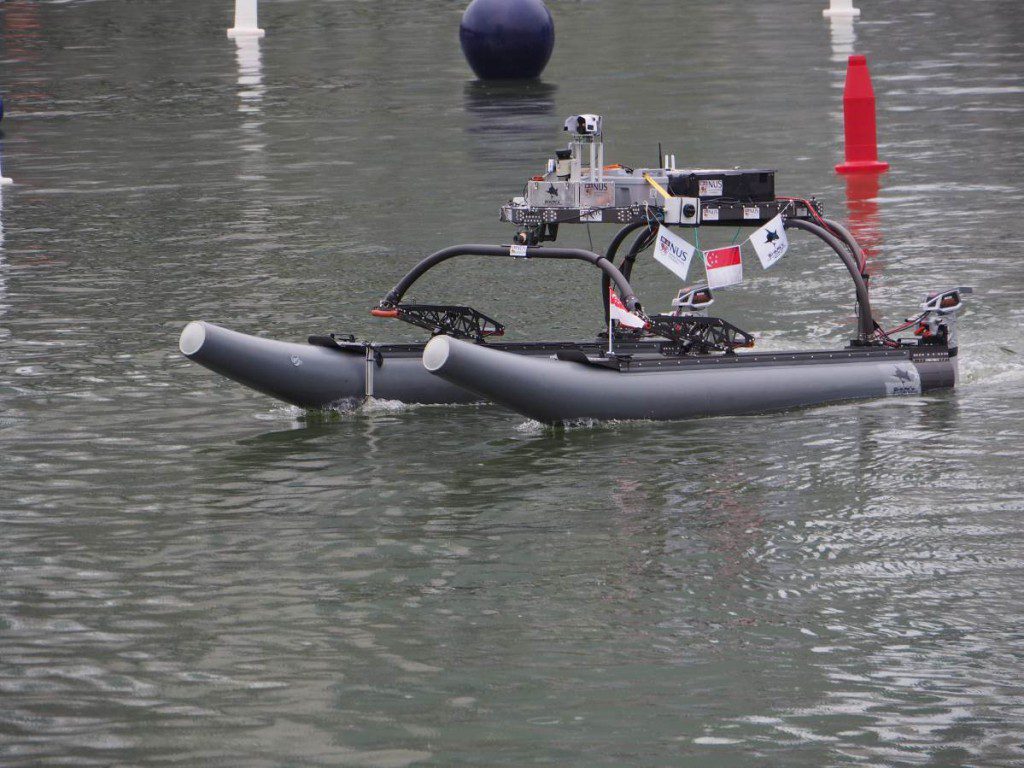
Unmanned Surface Vehicle
The purpose of this project is to explore low cost solution for obstacle and collision avoidance for USV based on low cost sensors (such as vision, GPS, IMU, etc). New algorithms will be implemented and tested on our physical surface vehicle. The algorithms should enable the vehicle to move from a start point towards an end point while avoid colliding with obstacles randomly placed between the start and end points.
Velusamy Subramaniam
Assistant Professor
Email: mpesubra@nus.edu.sg
Chew Chee Meng
Associate Professor
Email: chewcm@nus.edu.sg
Mandar Anil Chitre
Assistant Professor (ECE)
Email: tmsmac@nus.edu.sg
Effectively simultaneous localized manipulation of multiple magnetic micro-particles
The key challenge in manipulating multiple magnetic micro-particles individually and simultaneously lies on the ability to localize the magnetic field applied on an individual particle. This provides a direct means to apply force and torque on individual particles without significantly affecting other particles in an ensemble. Our research aims to develop a micro-magnetic field manipulation technique that enables the application of highly localized magnetic fields on a micro-particle.
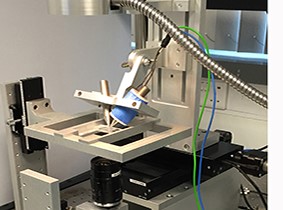
Adaptive robotic task execution with in-situ model error compensation
In computer-integrated manufacturing industries, it is a common issue that a manufactured work piece does not accurately correspond to its original/nominal virtual 3D model. This issue often leads to errors in processing the work piece by a robot. 3D scanning technology in combination with reverse engineering techniques are used to determine the 3D CAD model of the work piece. This scanned model is then compared to the original model based on model difference identification algorithms to determine the model error. Our research aims to compensate such model errors by augmenting the robot trajectory control with an error-compensation loop.
Peter C.Y. Chen
Associate Professor
Email: mpechenp@nus.edu.sg
ARMCON: An Assistive Ramp-Merging Control System for Dense Traffic Management
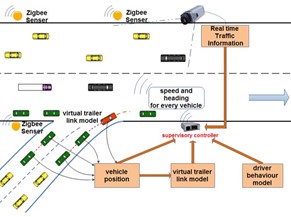
Contrary to intuitive thinking, the culprit of traffic congestion is not simply the sheer number of vehicles on the road. Empirical studies have revealed that driver behaviour plays a key role in the forming of traffic congestion. The effect of driver behaviour on traffic congestion is the most prominent in the dynamics of on-ramp merging, which is known to be one major cause of traffic congestion in large cities. Our research aims to develop an Assistive Ramp-Merging CONtrol (ARMCON) system to guide the on-ramp driver when merging with the main traffic on the express way in order to minimize the disruption of the main traffic on the express while a certain merging rate is maintained.
Peter C.Y. Chen
Associate Professor
Email: mpechenp@nus.edu.sg
Mobility on Demand Using Autonomous Vehicles
The research aims at self-driving vehicles to provide mobility on demand for everyone. It promotes vehicle sharing where commuters can call a vehicle anytime and anywhere. The vehicle arrives autonomously to where the commuter is within 5 minutes, and takes the commuter directly to the destination. The vehicle is wireless connected to the Internet, and the passengers can be productive inside the vehicle while the vehicle drives itself to the destination. Research focusses on achieving at least the expertise of human drivers for the self-driving cars to be able to operate in existing roads where human drivers are operating. The research includes the fleet managements system to optimally distribute vehicles based on demand patterns.

Marcelo H Ang Jr
Professor
Email: mpeangh@nus.edu.sg
Task Planning and Unified Force and Motion Control of Robotic Manipulators
Research aims at developing algorithms to achieve a unified force and motion control of robotic mechanisms for tasks that require active contact with the environment, such as in surface finishing and other applications. Such compliant motion is a fundamental capability for robots to do tasks that humans do so easily. The research also looks at the tasks planning in general and how it related to compliant motion control. Experimental platforms include the state of the art industrial robots with open architectures, such as the Kuka IIWA and Quanser Denso robots.

Marcelo H Ang Jr
Professor
Email: mpeangh@nus.edu.sg
Design of Robotic Mobile Manipulator
This research focuses on design of robotic manipulators that provide manipulation capability and mobility at the same time. It involves mechanical design and includes the use of novel and soft materials as actuators and sensors, as well as variable damping and stiffness systems to achieve human-friendly robotic mobile manipulators that can interact naturally and safely with humans.
Human-Robot Collaboration
Research in human-robot collaboration covers both physical and cognitive interactions. It includes how a human explains the task for a robot to do, how the robot and human works together to accomplish the task, as well as the situation awareness to allow the human and robot to help each other while the task is being executed. Target tasks include robotic Co-worker and robots to interact with autistic children.

Marcelo H Ang Jr
Professor
Email: mpeangh@nus.edu.sg