

Mr. Xue Junyuan, a PhD student and recipient of the NGS (ISEP) scholarship, has won the Student Best Poster Award at the Singapore Intelligence, Robotics, and Control Symposium 2025 (SIRC 2025). His research is supervised by Professor Tong Heng Lee and Adjunct Assistant Professor Wenyu Liang from the Department of Electrical and Computer Engineering (ECE), NUS.
This award acknowledges the team’s contributions to the innovative research on proposing the control framework for safe and high-performance physical robotic interactions. The SIRC 2025 is a one-day conference promoting collaboration among researchers in control, artificial intelligence, and robotics in Singapore. Forty accepted journal and conference papers are shared as student posters at SIRC 2025, and three are awarded.
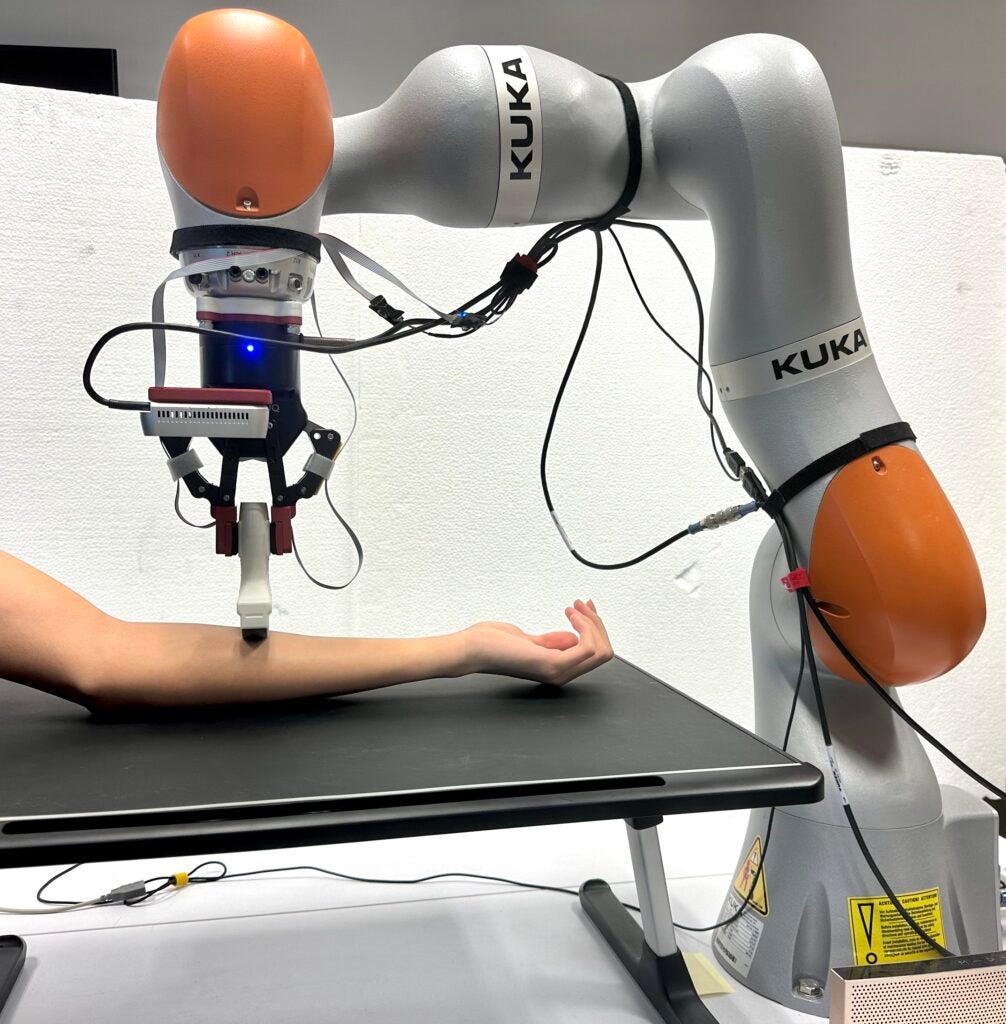
Junyuan’s award-winning paper, “Model Predictive Variable Impedance Control Towards Safe Robotic Interaction in Unknown Disturbance-Rich Environments,” tackles the challenge of balancing interaction safety and performance—especially when humans are involved. The study integrates tactile sensors into a robot gripper, working alongside an adaptive parameter estimator to enhance environmental perception and estimation. The research also introduces the Model Predictive Variable Impedance Controller (MPVIC), which ensures safe interactions through impedance model switching, passivity guarantees, and MPC constraints.
The proposed control framework has significant applications in robotic-assisted procedures requiring both safety and precision. One notable use case is robotic ultrasound scanning, where adaptive and robust impedance control is critical for ensuring patient safety and accurate imaging.
Congratulations to Xue Junyuan and his team for this outstanding achievement!
Paper Information:
J. Xue, W. Liang, Y. Wu, and T. H. Lee, “Model Predictive Variable Impedance Control Towards Safe Robotic Interaction in Unknown Disturbance-Rich Environments,” 𝘙𝘰𝘣𝘰𝘵𝘪𝘤𝘴 𝘢𝘯𝘥 𝘈𝘶𝘵𝘰𝘯𝘰𝘮𝘰𝘶𝘴 𝘚𝘺𝘴𝘵𝘦𝘮𝘴, vol. 189, July 2025, doi: 10.1016/j.robot.2025.104961.


