

Description
The ECE Project Showcase, aka ExCEllence, is an exciting event that highlights the innovative projects undertaken by students from the NUS ECE. From Final Year Projects (FYPs) and course-related projects to award-winning external competition entries, this showcase offers a platform for students to present their work to peers, faculty, and industry professionals.
The event also provides a unique opportunity for industry partners to engage with our students, explore emerging ideas, and share insights. Whether you're a student looking for inspiration or an industry professional keen on discovering fresh talent, the inaugural ECE Project Showcase 2025 is the place to be!

Know an outstanding project that deserves to be recognized? We’re calling for nominations for the ECE Project Showcase 2025! Whether it’s a Final Year Project, a course-related innovation, or an award-winning external competition entry, we want to feature the best work from our students.
📌 Who can nominate? Students and faculty
📌 What are we looking for? Innovative, impactful, and well-executed projects
📌 Why nominate? Give deserving projects the spotlight and inspire the ECE community!
🌟Stand to win attractive prizes!
Submit your nominations today and help us showcase the best of ECE!
Find out more about the eligibility for the competition.
Voting
The ECE Project Showcase 2025 is an exciting platform for students to present their innovative projects, engage with industry professionals, and compete for top awards. Whether you're a participant or an attendee, there’s something for everyone.
Be Part of the Excitement!
✅ Explore cutting-edge ECE projects
✅ Vote for the Most Inspiring, Most Impactful and Most Sustainable (note: Student-Run Teams are not eligible to participate)
✅ Support and celebrate student achievements
✅ Win attractive prizes as a voter!
Find out more about the eligibility and the prizes/awards details.
Categories
Competitive

Capstone Posters

EE/CEG Courses Projects

MSc Projects
Non-Competitive

External Competition Projects

Knowledge Sharing Projects

Student-Run Team Projects
Capstone Posters
-
The evaluation criteria include the clarity and design of your poster, the overall impact of your work, your presentation skills, etc.
6U Cubesat Power Supply Development
 The capstone team designs a new power supply system (PSS) and edge-computing camera (ECC) payload module for 6U Cubesat. The energy storage system (ESS) consist of five LFP26650 batteries and battery management system. The ESS supplies the necessary energy to ECC via power electronic system (PES). The in-house PES is capable of supplying 3.3V, 5V and 12V, depending on the payload and Cubesat subsystem requirements. Here, the ESS is supplying power to ECC via PES. The ECC is equipped with a low-cost camera module. It demonstrates the capability of in-orbit image processing via intelligent object classification method.
The capstone team designs a new power supply system (PSS) and edge-computing camera (ECC) payload module for 6U Cubesat. The energy storage system (ESS) consist of five LFP26650 batteries and battery management system. The ESS supplies the necessary energy to ECC via power electronic system (PES). The in-house PES is capable of supplying 3.3V, 5V and 12V, depending on the payload and Cubesat subsystem requirements. Here, the ESS is supplying power to ECC via PES. The ECC is equipped with a low-cost camera module. It demonstrates the capability of in-orbit image processing via intelligent object classification method.
The team consists of ECE students (Chew Yong Zhang, Haja Shareef Mohamed Suhail & Harshni Priya D/O Venkatesan).
Achieving Net-Zero Buildings through Data Analytics
 This project explores innovative solutions to retrofit an existing building, Building E1 at the National University of Singapore, into a Net Zero Energy Building (NZEB) by targeting four key subsystems: Plug Load, Lighting, Air Conditioning and Mechanical Ventilation (ACMV), and Solar Power generation. By integrating technologies such as TP-Link smart plugs, PIR motion and daylight sensors, hybrid fans, cool paints, and an expanded solar PV system, the team aims to reduce energy consumption and maximise renewable energy generation.
This project explores innovative solutions to retrofit an existing building, Building E1 at the National University of Singapore, into a Net Zero Energy Building (NZEB) by targeting four key subsystems: Plug Load, Lighting, Air Conditioning and Mechanical Ventilation (ACMV), and Solar Power generation. By integrating technologies such as TP-Link smart plugs, PIR motion and daylight sensors, hybrid fans, cool paints, and an expanded solar PV system, the team aims to reduce energy consumption and maximise renewable energy generation.
The team consists of ECE students (Chua Pei Da Bernard, Tan Ze Jun, Ong Celine & Lee Wei Jian).
AIoT Lighting System for Urban Farm to Reduce Energy Consumption and Customized Lighting recipe
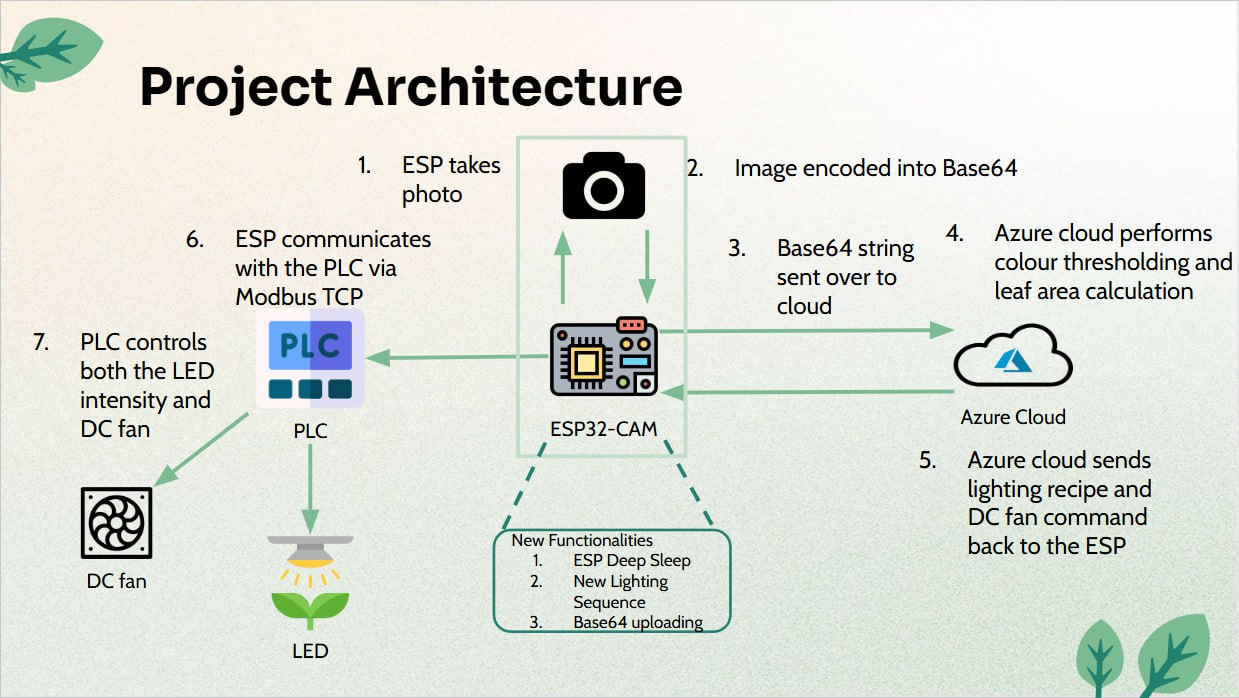 One of the main aspects of urban indoor farming is lighting. Depending on the stage of growth of the plant or the size of its leaves, the lighting combination or intensity has to be manually changed for the plant to receive the optimal dose of light to properly grow. Therefore, the team aims to automate this process, reducing the need for manual intervention. The team plans to develop an AIoT lighting system that would change according to the size of the plant’s leaves or the growth stage of the plant (germination or vegetative state). While lighting is crucial for indoor farming, it is also the primary driver of high energy consumption. This project not only aims to automates the process to reduce manual intervention but also to address the high energy consumption issues in lighting and to explore possible optimisations in other areas. This final year project will focus on automating the system by experimenting with various techniques such as better image uploading to the cloud and image processing on the cloud. This project will also explore different methods to enhance energy efficiency by improving the ESP32-CAM operations and using a dynamic lighting system.
One of the main aspects of urban indoor farming is lighting. Depending on the stage of growth of the plant or the size of its leaves, the lighting combination or intensity has to be manually changed for the plant to receive the optimal dose of light to properly grow. Therefore, the team aims to automate this process, reducing the need for manual intervention. The team plans to develop an AIoT lighting system that would change according to the size of the plant’s leaves or the growth stage of the plant (germination or vegetative state). While lighting is crucial for indoor farming, it is also the primary driver of high energy consumption. This project not only aims to automates the process to reduce manual intervention but also to address the high energy consumption issues in lighting and to explore possible optimisations in other areas. This final year project will focus on automating the system by experimenting with various techniques such as better image uploading to the cloud and image processing on the cloud. This project will also explore different methods to enhance energy efficiency by improving the ESP32-CAM operations and using a dynamic lighting system.An Educational Simulator and Framework for RISC-V Processor
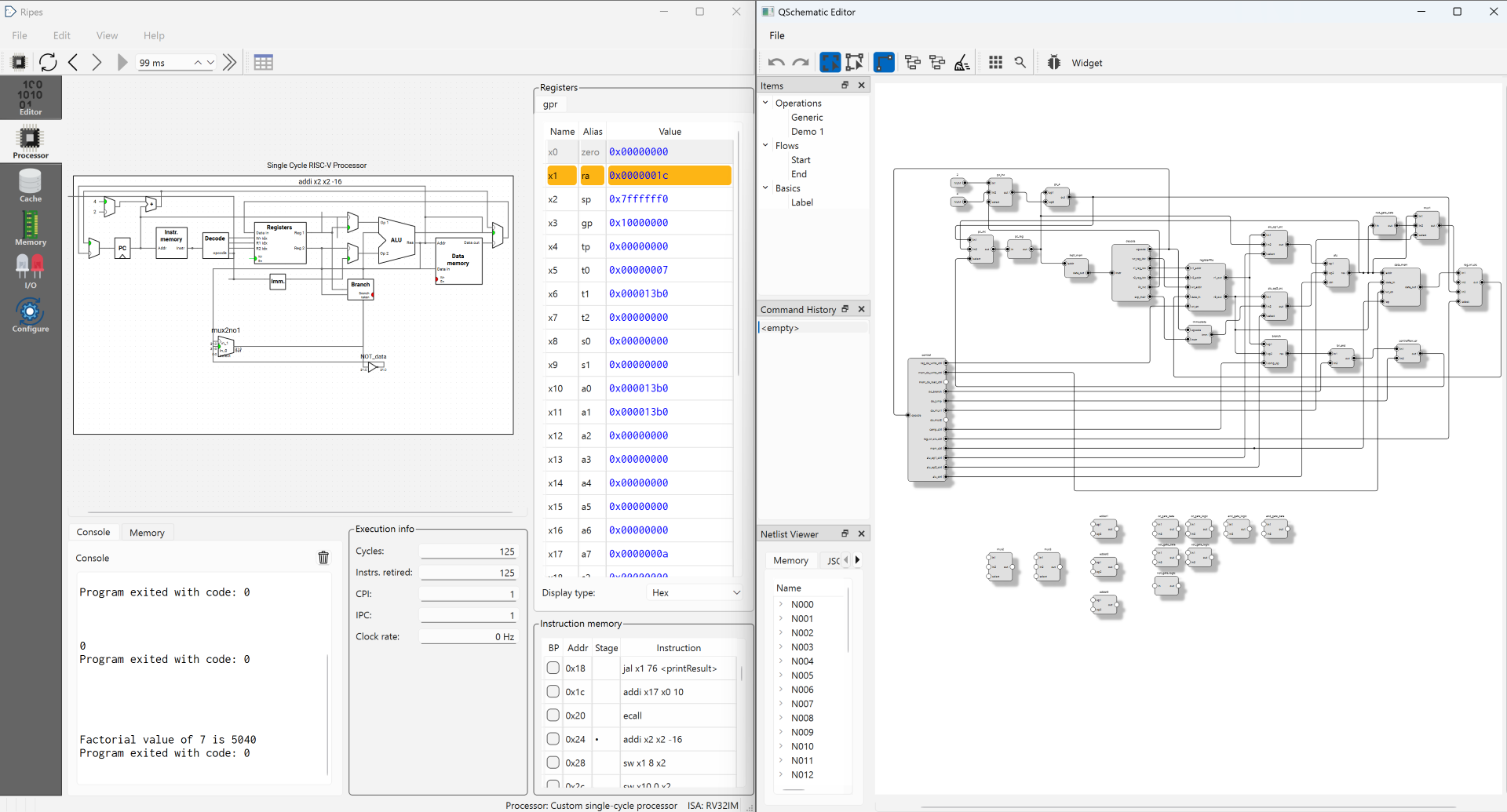 A Qt-based C++ software providing an intuitive interface that lets users dynamically connect circuits to test various configurations of a RISC-V microarchitecture processor. It functions as a cycle accurate simulator for educational purposes.
A Qt-based C++ software providing an intuitive interface that lets users dynamically connect circuits to test various configurations of a RISC-V microarchitecture processor. It functions as a cycle accurate simulator for educational purposes.
The project was developed by ECE student (Hao Lei).
An Unsupervised Federated Learning-Based Framework for Intrusion Detection in IoT Networks
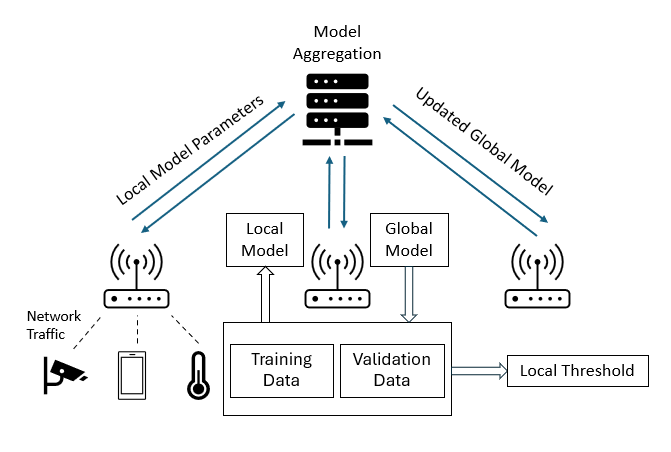 The growing integration of Internet of Things (IoT) devices into critical infrastructure demands robust cybersecurity measures, particularly for detecting network intrusions. Traditional intrusion detection systems (IDS), including signature-based and centralized machine learning (ML) methods, often rely on extensive labeled data and centralized processing, making them unsuitable for resource-constrained and privacy-sensitive IoT environments. To address these limitations, this work proposes a novel federated learning (FL) framework that combines semi-supervised learning with federated transfer learning for intrusion detection. The key innovation lies in leveraging autoencoders on the client side to learn local behavior profiles in an unsupervised manner, which are aggregated into a shared encoder at the server side and fine-tuned using a small amount of labeled data. Unlike conventional FL methods, our approach supports personalization by allowing the global encoder to be retrained as part of an autoencoder on each client to better adapt to local data distributions. This hybrid design enables effective learning under non-IID data distributions, scarce labels, and heterogeneous client resources. Experimental results demonstrate that the proposed approach improves detection performance, enhances personalization, and maintains data privacy, highlighting its practicality for real-world, large-scale IoT security applications.
The growing integration of Internet of Things (IoT) devices into critical infrastructure demands robust cybersecurity measures, particularly for detecting network intrusions. Traditional intrusion detection systems (IDS), including signature-based and centralized machine learning (ML) methods, often rely on extensive labeled data and centralized processing, making them unsuitable for resource-constrained and privacy-sensitive IoT environments. To address these limitations, this work proposes a novel federated learning (FL) framework that combines semi-supervised learning with federated transfer learning for intrusion detection. The key innovation lies in leveraging autoencoders on the client side to learn local behavior profiles in an unsupervised manner, which are aggregated into a shared encoder at the server side and fine-tuned using a small amount of labeled data. Unlike conventional FL methods, our approach supports personalization by allowing the global encoder to be retrained as part of an autoencoder on each client to better adapt to local data distributions. This hybrid design enables effective learning under non-IID data distributions, scarce labels, and heterogeneous client resources. Experimental results demonstrate that the proposed approach improves detection performance, enhances personalization, and maintains data privacy, highlighting its practicality for real-world, large-scale IoT security applications.CanSat Electronic System, Payload and Flight Software Development
 The capstone team designed and developed the sensors, power supply, communication and firmware for the joint Cansat Team (ECE and EDIC). The team has successfully prototyped and integrated all the necessary sensor and electronic. In addition, the capstone team has successfully demonstrated the data transmission from Cansat electronic system to the ground station software that was developed by their teammate. The printed circuit board (PCB) will be fabricated once the necessarily Cansat mechanical testing has been completed.
The capstone team designed and developed the sensors, power supply, communication and firmware for the joint Cansat Team (ECE and EDIC). The team has successfully prototyped and integrated all the necessary sensor and electronic. In addition, the capstone team has successfully demonstrated the data transmission from Cansat electronic system to the ground station software that was developed by their teammate. The printed circuit board (PCB) will be fabricated once the necessarily Cansat mechanical testing has been completed.
The team consists of ECE students (Gavin Chia Chui En, Neo Jun Qiao & Ee Ansheng).
Designing an FPGA System for Simulating Mem-transistor Analog Computing
 Traditional architectures separate memory and computation, resulting in high energy costs and latency due to constant data shuttling. As AI expands into edge applications like wearables and IoT, there's an urgent need for low-power, high-performance alternatives to GPU-based inference systems.
Traditional architectures separate memory and computation, resulting in high energy costs and latency due to constant data shuttling. As AI expands into edge applications like wearables and IoT, there's an urgent need for low-power, high-performance alternatives to GPU-based inference systems.
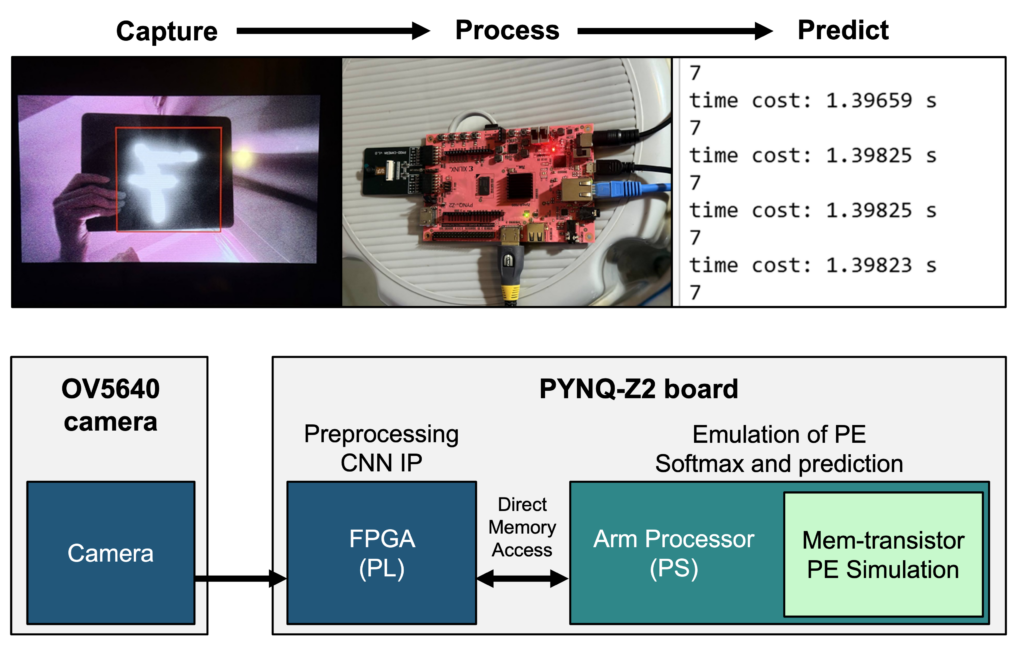
This project explores analog compute-in-memory (CIM) using mem-transistor-based processing elements, where data is processed directly within memory. Leveraging the natural summing behavior of analog circuits, CIM significantly reduces power consumption for AI workloads.
a CIM emulator integrated with a PYNQ-Z2 FPGA was developed, offloading the MAC-heavy fully connected layer of a CNN. The result: a live digit recognition demo that showcases the feasibility and efficiency of CIM for edge AI inference.
The team consists of ECE students (Wang Yanxiao Austin, Men Jiying, Pier Chia Shao Rong & Zhang Tianyue).
Development of AI-Driven Smart Power Quality Analyzer
 Power Quality Events (PQEs) such as voltage sags, interruptions, harmonics, and transients can critically impact device performance and business operations. For example, during a voltage sag, constant power loads demand higher current, potentially overwhelming the power supply and reducing productivity. Additionally, with increasing adoption of renewable energy, power converters introduce harmonics—non-useful current components that cause I²R losses and equipment overheating.
Power Quality Events (PQEs) such as voltage sags, interruptions, harmonics, and transients can critically impact device performance and business operations. For example, during a voltage sag, constant power loads demand higher current, potentially overwhelming the power supply and reducing productivity. Additionally, with increasing adoption of renewable energy, power converters introduce harmonics—non-useful current components that cause I²R losses and equipment overheating.
This project presents a real-time AI-driven Smart Power Quality Analyzer designed to detect and classify PQEs to enable timely corrective actions. It integrates data generation, processing, and machine learning-based classification of various PQEs.
The trained model was deployed using a real-time simulation setup with the Ametek AST3003 (for signal generation) and dSPACE (for interfacing). The system accurately identifies and displays PQEs in real time, enabling continuous, intelligent monitoring of power quality.
The team consists of ECE students (Clinton Yong Tzen Wei, Wong Zheng Wei, Wu Jialiang & Thirumoorthy Iswarya).
Development of AIOT Sensing System for Food Resilience and Sustainability
 In this project, we aim to support Singapore’s ‘30 by 30’ food security initiative which is to produce 30 per cent of its nutritional needs locally by 2030. Our project focuses on developing an Artificial Intelligence of Things (AIoT) system using image processing and machine learning (ML) to determine the optimal lighting conditions for crops at different growth stages. Data captured by the microcontrollers is transmitted to a cloud server, where it is processed, stored and analysed. Based on these insights, the lighting intensities and wavelengths are automatically adjusted to enhance crop yield while reducing energy and labour costs. Key efforts included configuring cloud communication with the ESP32-CAM, setting up SQL databases for data storage, integrating ML models for lighting optimisation and also creating a user interface using Power Apps. The casing for the ESP32 camera was also an important detail to ensure the sufficient protection and accessibility in a real-world farm setting. Together, these developments culminated in a functional, scalable AIoT system suitable for modern indoor farming applications. With continued innovation and collaboration, this work lays the foundation for smarter, more efficient, and sustainable indoor farming practices.
In this project, we aim to support Singapore’s ‘30 by 30’ food security initiative which is to produce 30 per cent of its nutritional needs locally by 2030. Our project focuses on developing an Artificial Intelligence of Things (AIoT) system using image processing and machine learning (ML) to determine the optimal lighting conditions for crops at different growth stages. Data captured by the microcontrollers is transmitted to a cloud server, where it is processed, stored and analysed. Based on these insights, the lighting intensities and wavelengths are automatically adjusted to enhance crop yield while reducing energy and labour costs. Key efforts included configuring cloud communication with the ESP32-CAM, setting up SQL databases for data storage, integrating ML models for lighting optimisation and also creating a user interface using Power Apps. The casing for the ESP32 camera was also an important detail to ensure the sufficient protection and accessibility in a real-world farm setting. Together, these developments culminated in a functional, scalable AIoT system suitable for modern indoor farming applications. With continued innovation and collaboration, this work lays the foundation for smarter, more efficient, and sustainable indoor farming practices.
The team consists of ECE students (Goh Jun Heng, Khong Chun Kit, Malcolm Ang Shang Hui & Neo Kai En, Alyndia).
Developing Interpretable Models To Prognosticate Outcomes For SICH Patients Using Symbolic Regression And Machine Learning
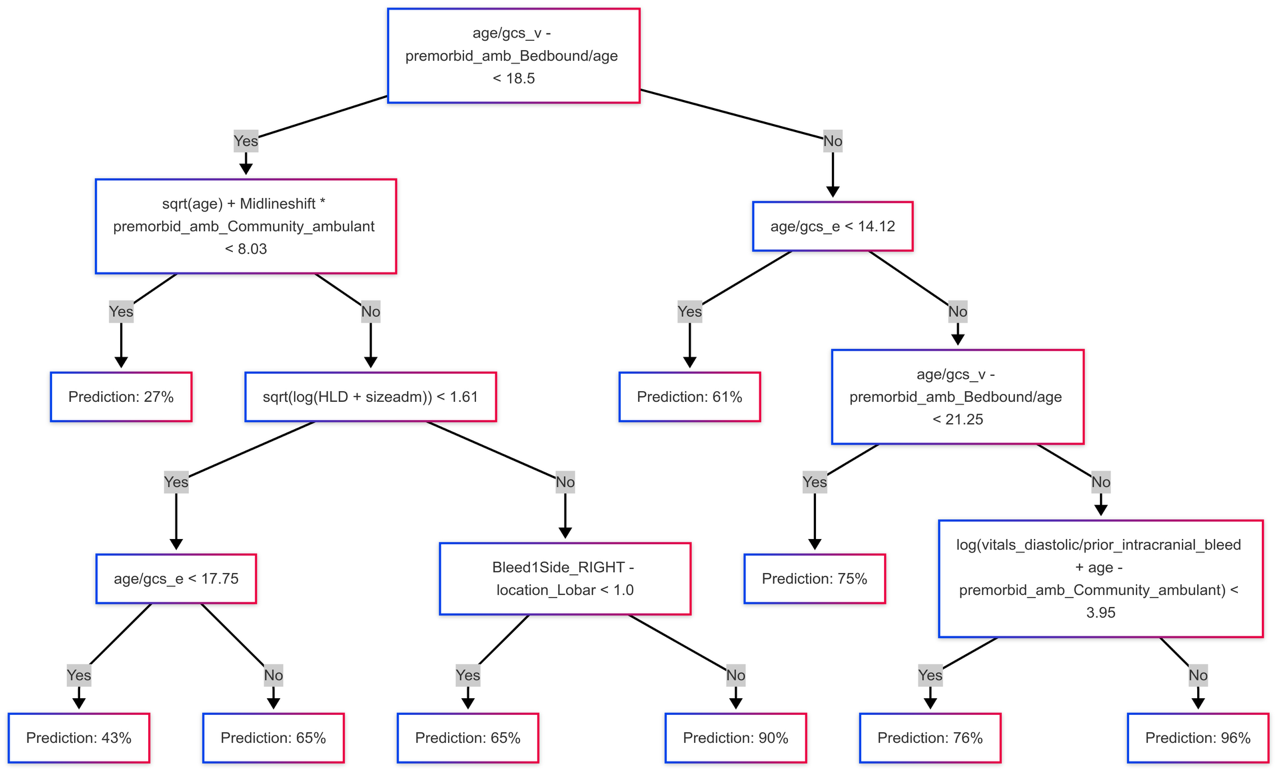 This paper explores the use of various Symbolic Regression techniques, most notably Symbolic Boolean Regression and Symbolic Regression Enhanced Decision Trees, to develop interpretable models for the prognostication of 90-Day PFO in SICH patients. Traditional Machine Learning models and the Uni-ACS framework, an algorithm to develop Clinical Scoring Systems from traditional Machine Learning models, were also applied to evaluate the competitiveness of the Symbolic Regression techniques. The trade-off between predictive power and complexity was investigated for all the developed models, and the clinical feasibility of each model was evaluated to determine if less complex models were necessarily more interpretable and practical.
This paper explores the use of various Symbolic Regression techniques, most notably Symbolic Boolean Regression and Symbolic Regression Enhanced Decision Trees, to develop interpretable models for the prognostication of 90-Day PFO in SICH patients. Traditional Machine Learning models and the Uni-ACS framework, an algorithm to develop Clinical Scoring Systems from traditional Machine Learning models, were also applied to evaluate the competitiveness of the Symbolic Regression techniques. The trade-off between predictive power and complexity was investigated for all the developed models, and the clinical feasibility of each model was evaluated to determine if less complex models were necessarily more interpretable and practical.
The project was developed by ECE student (Mahesh Kridhay).
Digitalizing Air Cargo Operations With Computer Vision
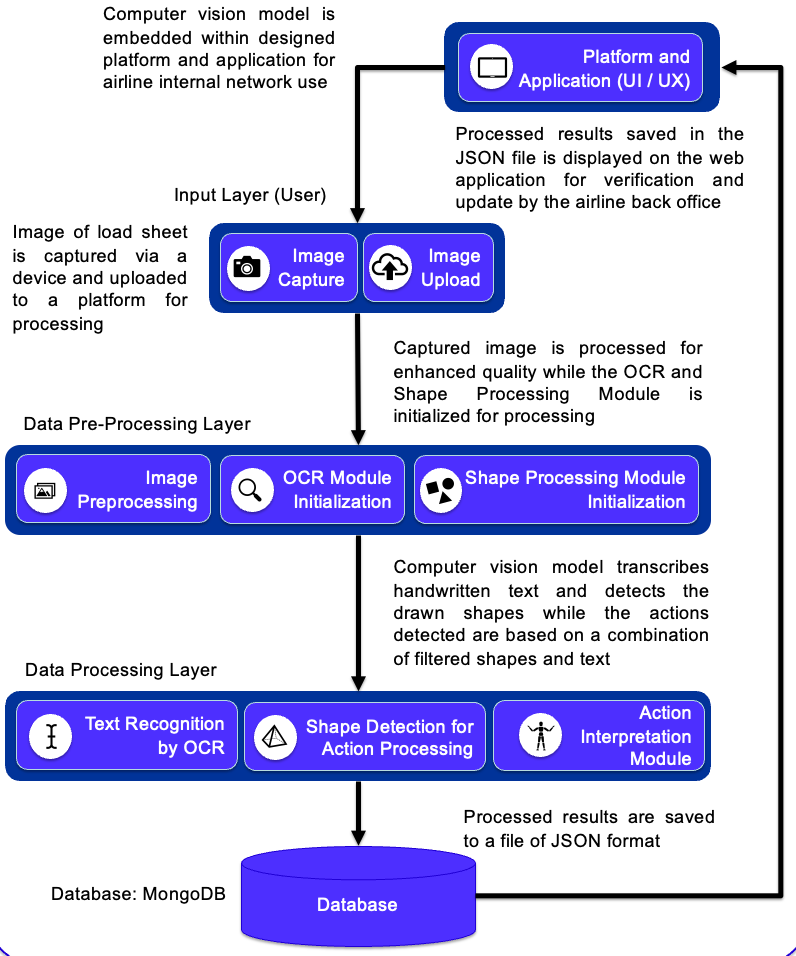 The project addresses a persistent challenge in the fast-growing air cargo industry as the sector still relies heavily on paper-based processes, the load sheet. Load sheets are critical safety documents that are manually updated by ground staff which often leads to miscommunication. In 2020 alone, 32% of 375 loading-related incidents were due to load sheets. Hence, the project explores the implementation of computer vision to accurately detect and interpret handwritten annotations on load sheets.
The project addresses a persistent challenge in the fast-growing air cargo industry as the sector still relies heavily on paper-based processes, the load sheet. Load sheets are critical safety documents that are manually updated by ground staff which often leads to miscommunication. In 2020 alone, 32% of 375 loading-related incidents were due to load sheets. Hence, the project explores the implementation of computer vision to accurately detect and interpret handwritten annotations on load sheets.
The project was developed by ECE student (Paul Khoo Bob June) in collaboration with Boeing.
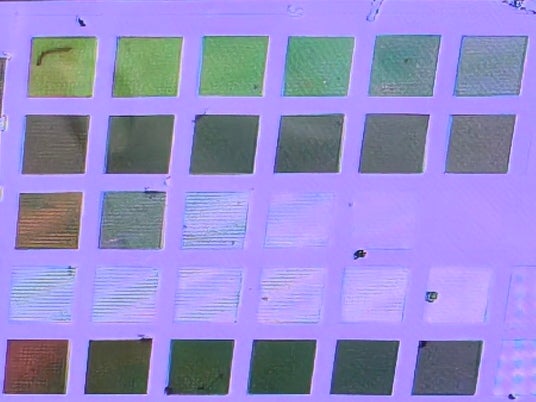
Engineering Subwavelength Nanostructures via Multi-Layer Nanosphere Photolithography
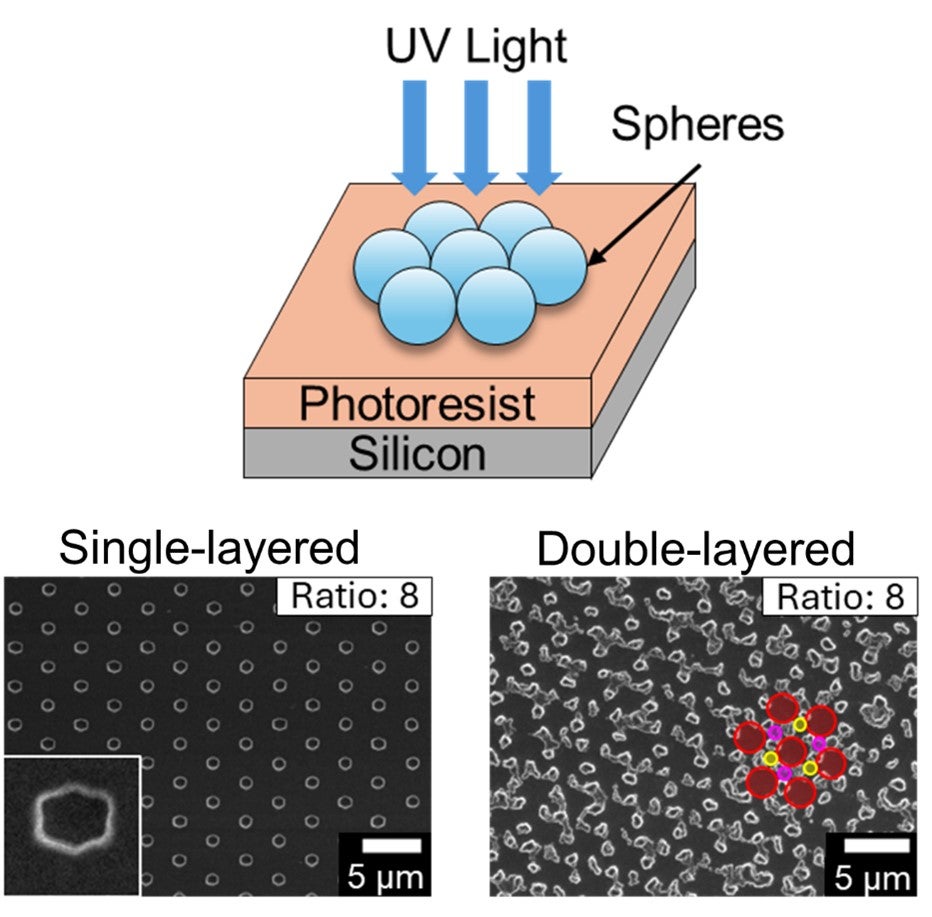 Nanosphere photolithography is a scalable, cost-effective fabrication technique for periodic nanostructures via the creation of photonic nanojets (PNJ). PNJ formation follows Mie scattering theory to produce subwavelength high intensity beams when light is focus through a spherical nanopartical. In this project, fabrication of unique subwavelength nanostructures by manipulating the sphere to wavelength ratio (swr) and the number of sphere layers was explored. Simulation was carried out via the finite-difference time-domain method using MIT Electromagnetic Equation Propagation (MEEP) software. Nanosphere layers with diameters of 0.5 to 3 µm were deposited on resist coated silicon substrates -- corresponding to swr of 1.3 to 8, with a 375 nm laser wavelength. Physical patterns were fabricated by optimizing the exposure dose and development time in order for the patterns to be formed in resist. Results show double-layered hexagonally close packed (hcp) 3um nanospheres create additional high and low intensity regions around each PNJ. These results provide a new strategy for creating novel subwavelength nanostructures over relatively large areas through multi-layer nanosphere photolithography through controlling sphere layering and size selection.
Nanosphere photolithography is a scalable, cost-effective fabrication technique for periodic nanostructures via the creation of photonic nanojets (PNJ). PNJ formation follows Mie scattering theory to produce subwavelength high intensity beams when light is focus through a spherical nanopartical. In this project, fabrication of unique subwavelength nanostructures by manipulating the sphere to wavelength ratio (swr) and the number of sphere layers was explored. Simulation was carried out via the finite-difference time-domain method using MIT Electromagnetic Equation Propagation (MEEP) software. Nanosphere layers with diameters of 0.5 to 3 µm were deposited on resist coated silicon substrates -- corresponding to swr of 1.3 to 8, with a 375 nm laser wavelength. Physical patterns were fabricated by optimizing the exposure dose and development time in order for the patterns to be formed in resist. Results show double-layered hexagonally close packed (hcp) 3um nanospheres create additional high and low intensity regions around each PNJ. These results provide a new strategy for creating novel subwavelength nanostructures over relatively large areas through multi-layer nanosphere photolithography through controlling sphere layering and size selection.
The project was developed by ECE student (Ip Wing Fai Ronald).
Exploration of Drone Fleet Management and Neural Radiance Field for Intelligence, Surveillance and Reconnaissance Purposes
 Multi-agent robot systems have gained significant attention in autonomous robotics, especially for applications like Intelligence, Surveillance, and Reconnaissance (ISR). ISR plays a crucial role in military and security operations by enabling real- time monitoring, data collection, and threat detection over large areas. This project demonstrates a low-cost, scalable drone fleet system for real-time ISR tasks. With Skybrush for coordination and Neural Radiance Fields for 3D mapping, the system achieves reliable performance in flight, video latency, and environmental reconstruction.
Multi-agent robot systems have gained significant attention in autonomous robotics, especially for applications like Intelligence, Surveillance, and Reconnaissance (ISR). ISR plays a crucial role in military and security operations by enabling real- time monitoring, data collection, and threat detection over large areas. This project demonstrates a low-cost, scalable drone fleet system for real-time ISR tasks. With Skybrush for coordination and Neural Radiance Fields for 3D mapping, the system achieves reliable performance in flight, video latency, and environmental reconstruction. The project was developed by ECE student (NeoSiao Bee, Dawn).
Green Apple : AI-Powered Fall Detection & Messaging for Seniors
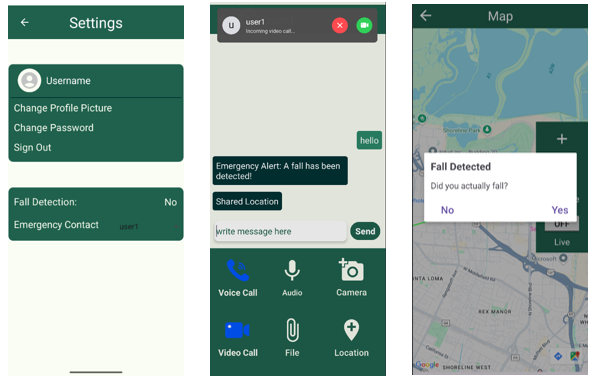
Seniors are often underserved by mobile lifestyle and messaging applications, which tend to feature cluttered interfaces and lack functions tailored to their needs. In response, this project presents a custom-built messaging app designed specifically for senior users — prioritizing simplicity, accessibility, and relevance.
Informed by research and community surveys, the app integrates user-friendly features and design elements suited for older adults. A key highlight is the built-in AI-powered fall detection system. This system monitors user activity, detects falls in real-time, and immediately alerts caregivers via a call and location-sharing feature, ensuring timely intervention during emergencies. Over time, the system adapts to the user’s behavior, improving accuracy and providing a personalized layer of protection and peace of mind.
Fabrication and Characterization of Magnonic Crystals for Spin Wave Manipulation
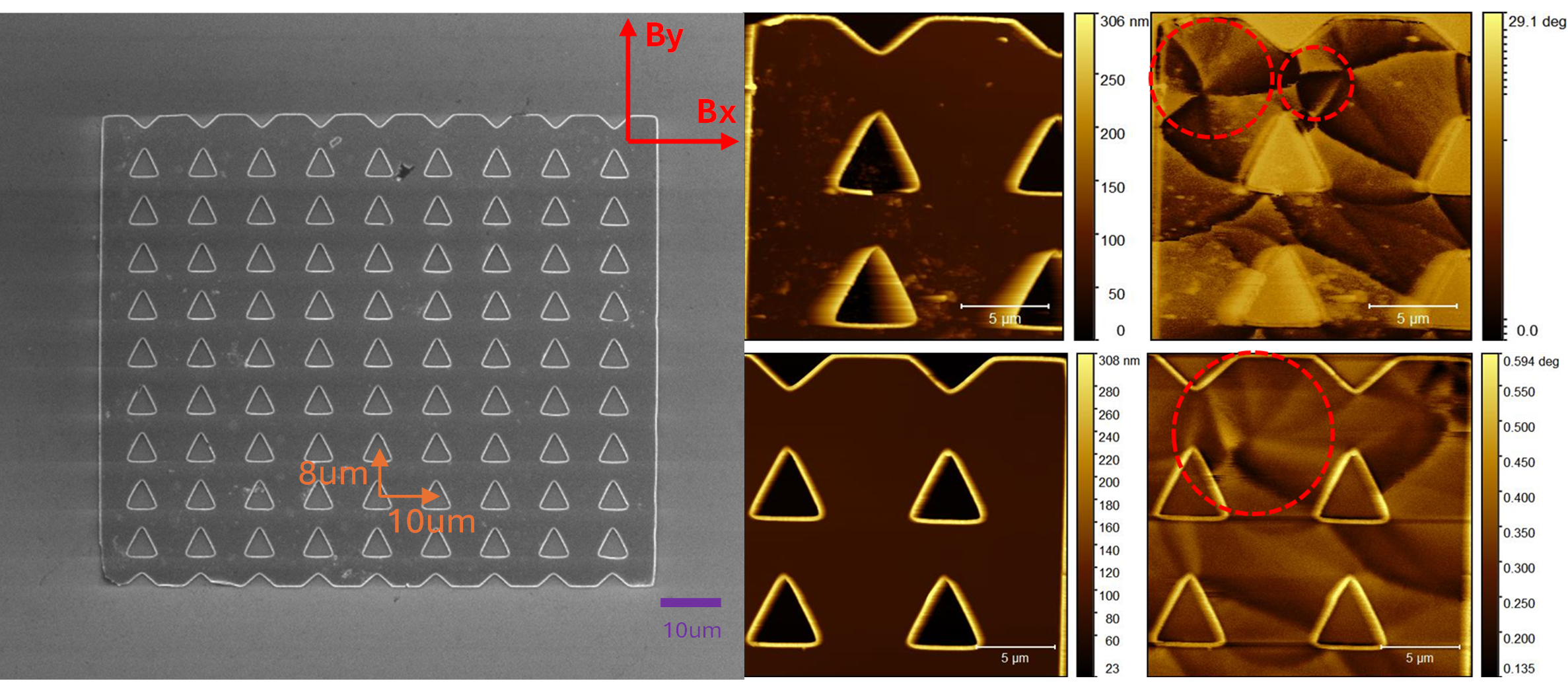 Magnonic systems offer a highly tunable platform for studying spin transport, with engineered spin textures like domain walls enabling reconfigurable modulation of spin waves. In this project, a reproducible method for fabricating Ni₈₁Fe₁₉ (permalloy) antidot films using optical lithography and electron beam evaporation was developed.
Magnonic systems offer a highly tunable platform for studying spin transport, with engineered spin textures like domain walls enabling reconfigurable modulation of spin waves. In this project, a reproducible method for fabricating Ni₈₁Fe₁₉ (permalloy) antidot films using optical lithography and electron beam evaporation was developed.
The study focused on introducing magnetic anisotropy through asymmetric edge patterning. By incorporating triangular notches into the antidot lattice, strong anisotropic behavior was induced, effectively altering the coercivity and swapping the easy and hard magnetic axes. This decoupling of coercivity from lattice geometry—validated through both experimental measurements and micromagnetic simulations—demonstrates a new degree of control over magnetic textures, with promising implications for spin wave modulation in magnonic applications.
Improvements of a Programmable Ultraviolet LED System
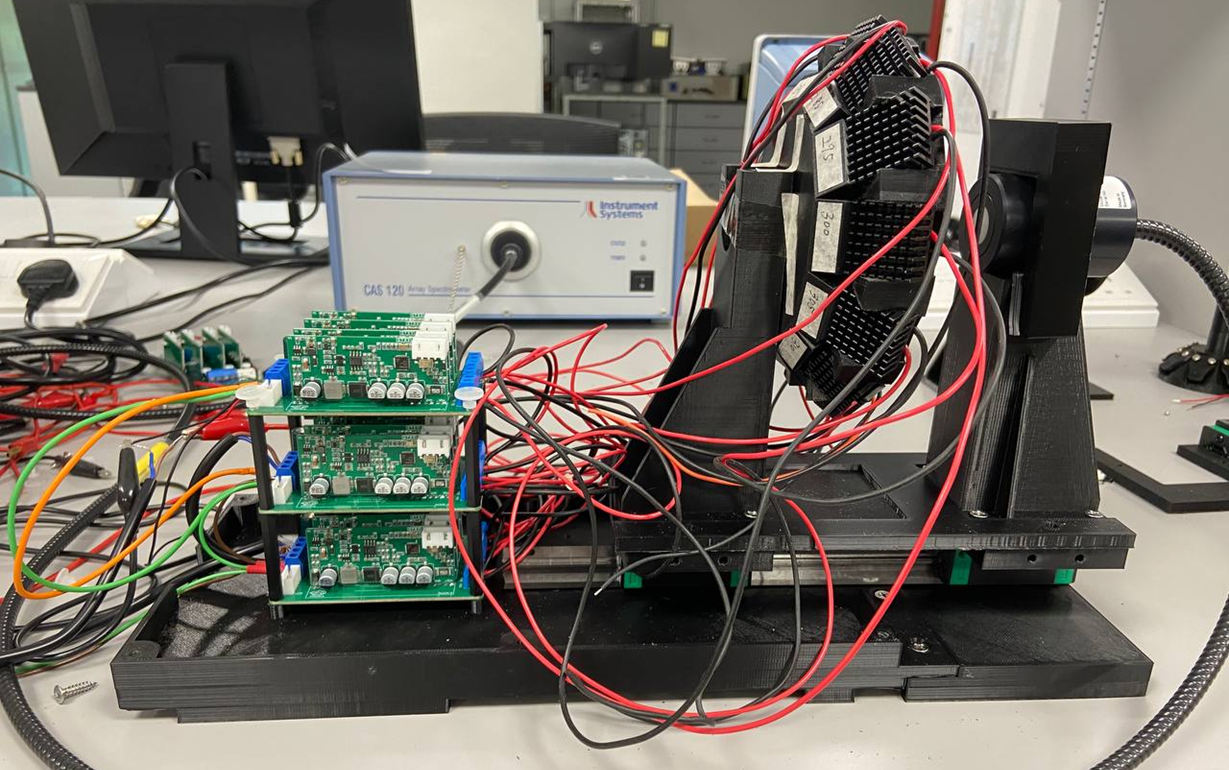 This project presents a series of systematic improvements made to an existing programmable ultraviolet (UV) LED system designed for generating customizable spectral outputs across the UVC to UVA range. The system originally featured an array of eight LEDs, each operating at distinct wavelengths. However, limitations in spectral accuracy, hardware stability, and data coverage prompted the need for enhancement. Key developments include expanding the LED array to twelve units to improve wavelength resolution, standardizing the irradiance data range, and addressing hardware inconsistencies such as the performance of the 330 nm LED. Additionally, the system was upgraded with a real-time current feedback control mechanism to compensate for temperature-induced variations in LED output. A new user interface feature for calculating and delivering precise UV doses based on target intensity and exposure time was also implemented, aligning the system with application-specific power requirements. These enhancements collectively elevate the system’s reliability, spectral fidelity, and usability, making it more suitable for advanced research and industrial applications.
This project presents a series of systematic improvements made to an existing programmable ultraviolet (UV) LED system designed for generating customizable spectral outputs across the UVC to UVA range. The system originally featured an array of eight LEDs, each operating at distinct wavelengths. However, limitations in spectral accuracy, hardware stability, and data coverage prompted the need for enhancement. Key developments include expanding the LED array to twelve units to improve wavelength resolution, standardizing the irradiance data range, and addressing hardware inconsistencies such as the performance of the 330 nm LED. Additionally, the system was upgraded with a real-time current feedback control mechanism to compensate for temperature-induced variations in LED output. A new user interface feature for calculating and delivering precise UV doses based on target intensity and exposure time was also implemented, aligning the system with application-specific power requirements. These enhancements collectively elevate the system’s reliability, spectral fidelity, and usability, making it more suitable for advanced research and industrial applications.
Personal Posture Reminder System (PPRS)
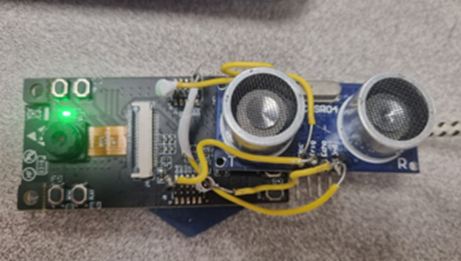 Poor sitting posture at the desk is very common among students and white-collar workers. Not only does it cause fatigue and reduce productivity, but it may also cause long-term injuries. Studies have also shown that leaning forward close to the device display or reading materials on the desk accelerates eyesight deterioration. This project aims to enable and encourage its users to self-correct their posture without the need to invest in expensive ergonomic furniture or contraptions. The key objective is to implement an affordable, robust, customizable, non-intrusive, and fairly accurate Personal Posture Reminder System (PPRS) that can easily be deployed whenever and wherever it is needed to help remind the user, at a preferred interval, of the correct posture at the desk via a mobile app. The small-sized, portable, easy-to-setup PPRS comprises a distance sensor, a webcam, a microcontroller (e.g. Raspberry Pi), an open-source cloud IoT analytics platform (e.g. Kaa IoT, ThingSpeak), and a simple mobile app (e.g. for iOS, Android). The distance sensor measures the distance between the user and the device display and relays it to the microcontroller. The webcam captures the user’s sitting posture at a regular interval. Based on this information, the microcontroller runs a posture monitoring algorithm and transfers only the essential data to the selected cloud IoT analytics platform for analysis, whose results are made available to the user via a mobile app. The basic version of PPRS should accurately announce if a particular posture is acceptable or not, indicated simply by green and red respectively, and play a warning tone if the user is too near to the device display (e.g. less than 50 cm), all on the simple mobile app. More functionalities can eventually be added in the enhanced version once the basic version is stable and the students are competent in developing the required PPRS hardware, software, cloud IoT analytics, and mobile app development.
Poor sitting posture at the desk is very common among students and white-collar workers. Not only does it cause fatigue and reduce productivity, but it may also cause long-term injuries. Studies have also shown that leaning forward close to the device display or reading materials on the desk accelerates eyesight deterioration. This project aims to enable and encourage its users to self-correct their posture without the need to invest in expensive ergonomic furniture or contraptions. The key objective is to implement an affordable, robust, customizable, non-intrusive, and fairly accurate Personal Posture Reminder System (PPRS) that can easily be deployed whenever and wherever it is needed to help remind the user, at a preferred interval, of the correct posture at the desk via a mobile app. The small-sized, portable, easy-to-setup PPRS comprises a distance sensor, a webcam, a microcontroller (e.g. Raspberry Pi), an open-source cloud IoT analytics platform (e.g. Kaa IoT, ThingSpeak), and a simple mobile app (e.g. for iOS, Android). The distance sensor measures the distance between the user and the device display and relays it to the microcontroller. The webcam captures the user’s sitting posture at a regular interval. Based on this information, the microcontroller runs a posture monitoring algorithm and transfers only the essential data to the selected cloud IoT analytics platform for analysis, whose results are made available to the user via a mobile app. The basic version of PPRS should accurately announce if a particular posture is acceptable or not, indicated simply by green and red respectively, and play a warning tone if the user is too near to the device display (e.g. less than 50 cm), all on the simple mobile app. More functionalities can eventually be added in the enhanced version once the basic version is stable and the students are competent in developing the required PPRS hardware, software, cloud IoT analytics, and mobile app development.
The team consists of ECE students (Javier Soon Quanlong, Lim Changyi, Lee Ming Ren & Lim Qian Yi Jeamne).
Radar Sensing to Detect Human Objects behind Wall
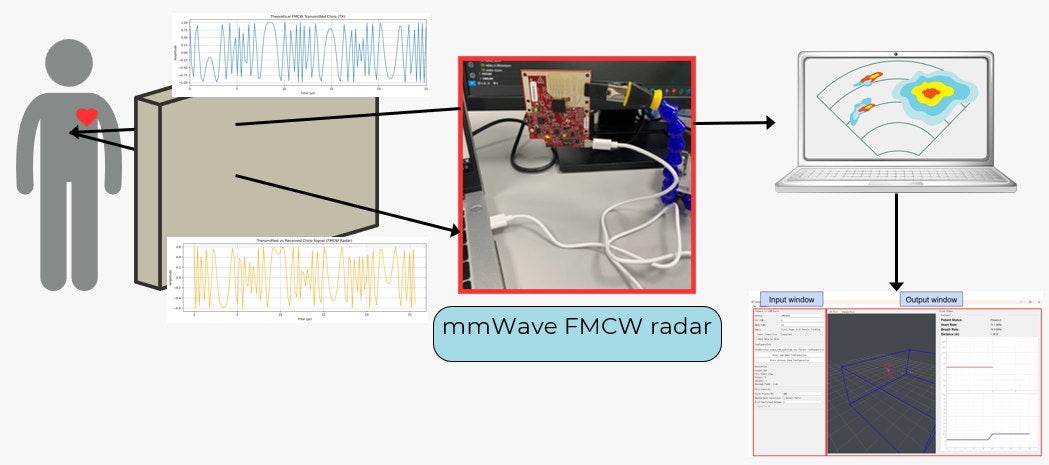 This project explores the use of millimeter-wave (mmWave) radar to detect human presence and monitor vital signs such as breathing and heart rate, even when a person is behind walls or in non-visible postures. The system is built around a Frequency-Modulated Continuous Wave (FMCW) radar sensor that transmits radio waves and analyzes the reflected signals to estimate distance and motion.
This project explores the use of millimeter-wave (mmWave) radar to detect human presence and monitor vital signs such as breathing and heart rate, even when a person is behind walls or in non-visible postures. The system is built around a Frequency-Modulated Continuous Wave (FMCW) radar sensor that transmits radio waves and analyzes the reflected signals to estimate distance and motion.
To evaluate its effectiveness, the radar was tested on human subjects behind various wall materials and in different postures (e.g., standing, lying, squatting). The results show that the radar can detect small chest movements associated with vital signs through common household barriers, with varying degrees of accuracy depending on wall type and body orientation.
This work demonstrates the potential of mmWave radar as a non-contact, through-wall sensing tool, especially for applications like post-earthquake rescue, where locating and monitoring people trapped under debris could save lives.
The project was developed by ECE student (Shao Luoyi).
State Estimation and Tracking of Maritime Surface Vessels using Ultra-Wideband Nodes
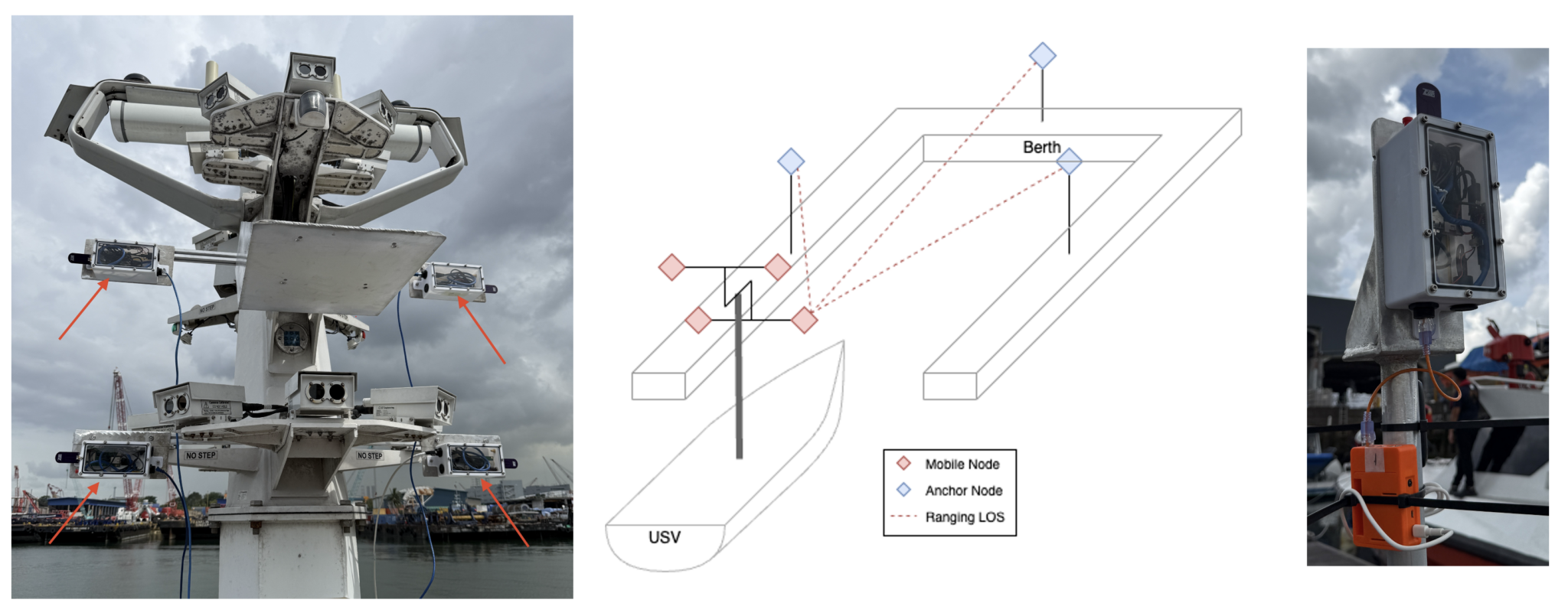 This project demonstrated a novel approach to tracking maritime vessel using ultra-wideband (UWB) nodes. Supported by ST Engineering, the system integrated hardware sensors and software localisation algorithms to estimate six state variables: easting, northing, yaw, and their corresponding rates in real time. A key innovation in the developed hardware interface was the remote configuration network stack, which enabled efficient, acknowledged updates of UWB hardware settings over its own UWB network, thereby eliminating the need for manual reconfiguration of each node. Three prominent tracking algorithms were implemented and compared for localisation: the Extended Kalman Filter (EKF), the Unscented Kalman Filter (UKF), and the Particle Filter (PF). Although the PF achieved the highest performance, its resource usage was disproportionately high. Conversely, the UKF provided the best balance between resource consumption and precision.
This project demonstrated a novel approach to tracking maritime vessel using ultra-wideband (UWB) nodes. Supported by ST Engineering, the system integrated hardware sensors and software localisation algorithms to estimate six state variables: easting, northing, yaw, and their corresponding rates in real time. A key innovation in the developed hardware interface was the remote configuration network stack, which enabled efficient, acknowledged updates of UWB hardware settings over its own UWB network, thereby eliminating the need for manual reconfiguration of each node. Three prominent tracking algorithms were implemented and compared for localisation: the Extended Kalman Filter (EKF), the Unscented Kalman Filter (UKF), and the Particle Filter (PF). Although the PF achieved the highest performance, its resource usage was disproportionately high. Conversely, the UKF provided the best balance between resource consumption and precision.
Amid rapid changes in global maritime trade and an increasing shift toward unmanned surface vehicles, this work lays a robust foundation for real-world testing and integration with guidance systems. The innovative approach not only provides a viable alternative to traditional GPS and camera-based systems but also demonstrates the scalability of UWB-based localisation, paving the way for enhanced tracking precision and operational reliability.
EE/CEG Courses Projects
-
The showcase should ideally include a live demonstration of the system.
-
The evaluation criteria assess the understanding of, and ability to apply, fundamental engineering principles in solving real-world problems, creativity in design and execution, etc.
-
A printed or displayed visual aid is optional. If included, it will serve only to aid in the explanation and will not be evaluated.
CG2111A: Alex (A Teleoperated Search and Rescue Robot for Lunar Exploration)
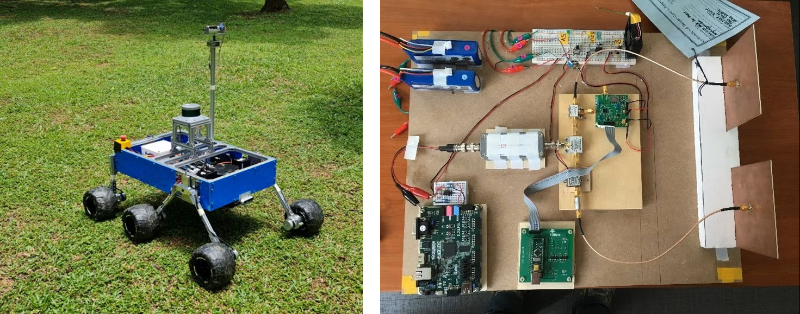 Alex is a teleoperated robot designed to simulate the core functionalities of a search and rescue system in a lunar environment. Operated wirelessly, it navigates through the simulated terrain of "Moon Base CEG," leveraging advanced sensing technologies for autonomous and assisted exploration. Equipped with color sensors, LiDAR for environmental mapping, and ultrasonic sensors for obstacle detection, Alex is capable of real-time terrain analysis and hazard avoidance. Its architecture is built on a dual-processor system, integrating a Raspberry Pi and an Arduino, which communicate through a custom serial protocol to ensure efficient data processing and control.
Alex is a teleoperated robot designed to simulate the core functionalities of a search and rescue system in a lunar environment. Operated wirelessly, it navigates through the simulated terrain of "Moon Base CEG," leveraging advanced sensing technologies for autonomous and assisted exploration. Equipped with color sensors, LiDAR for environmental mapping, and ultrasonic sensors for obstacle detection, Alex is capable of real-time terrain analysis and hazard avoidance. Its architecture is built on a dual-processor system, integrating a Raspberry Pi and an Arduino, which communicate through a custom serial protocol to ensure efficient data processing and control.
The team consists of ECE students (Rajeshprabu Sidharth, Joshua Yeo Wee Tze, Karthikeyan Vetrivel & Gao Shao Ann).
CG3207: Implementation and Evaluation of a Pipelined RISC-V Soft-Core Processor with Multi-Issue Processing / Branch Prediction
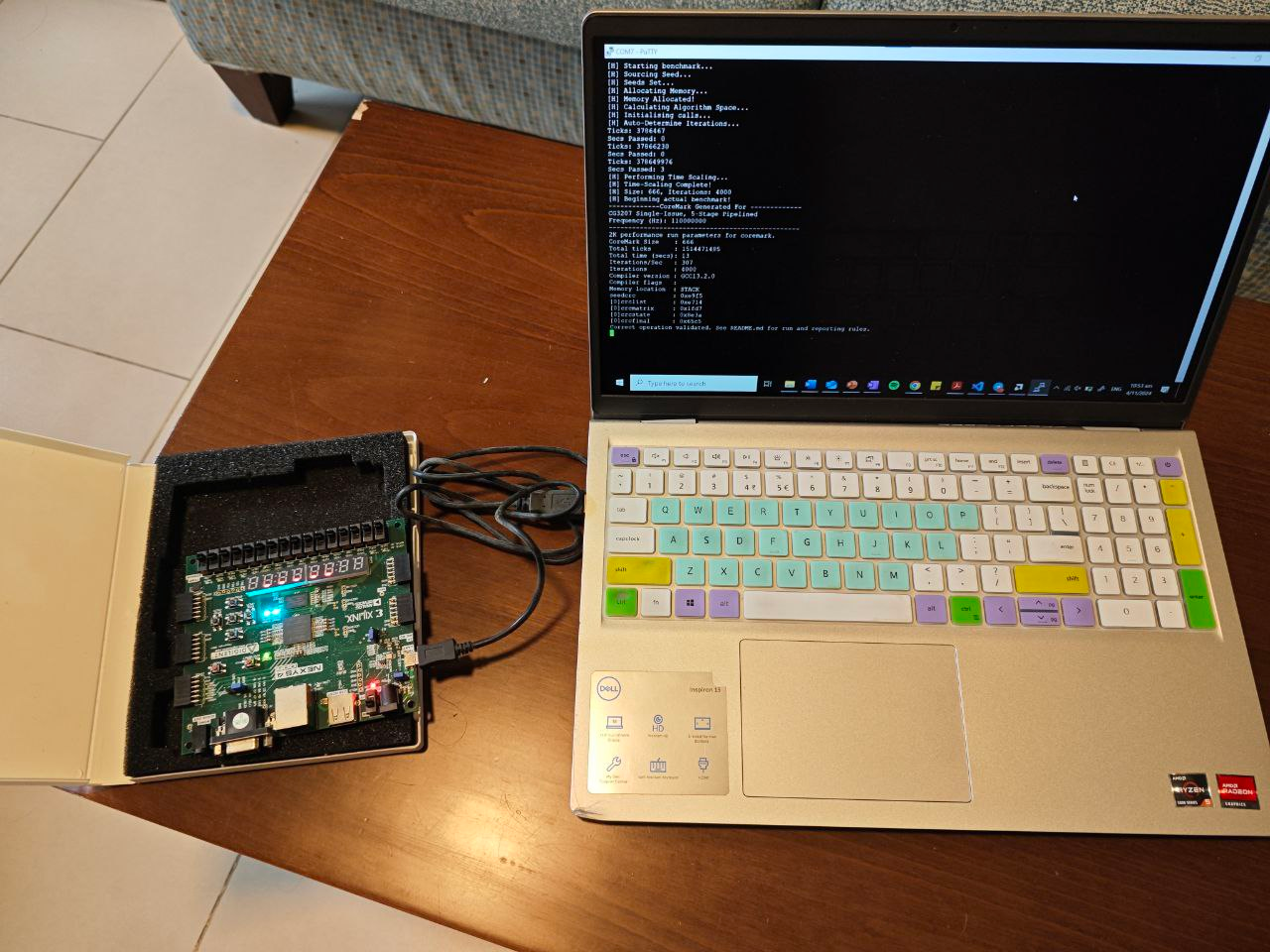 This project presents the design and implementation of a soft-core processor based on the RISC-V RV32IM Instruction Set Architecture (ISA), developed at the Register Transfer Level (RTL) using Verilog and validated on a Field-Programmable Gate Array (FPGA). The processor executes instructions compiled into machine code—binary representations of low-level Assembly Language—which the CPU interprets to perform core computational tasks such as memory operations, arithmetic calculations, and program control flow.
This project presents the design and implementation of a soft-core processor based on the RISC-V RV32IM Instruction Set Architecture (ISA), developed at the Register Transfer Level (RTL) using Verilog and validated on a Field-Programmable Gate Array (FPGA). The processor executes instructions compiled into machine code—binary representations of low-level Assembly Language—which the CPU interprets to perform core computational tasks such as memory operations, arithmetic calculations, and program control flow.
To enhance performance, the processor features a 5-stage pipelined architecture, allowing sub-steps of multiple instructions to be executed in parallel, thereby improving instruction throughput. Key components implemented include:
-
Hazard Resolution Unit: Detects and resolves data hazards arising from dependencies between instructions in the pipeline.
-
Branch Predictor Unit: Improves efficiency by forecasting the outcome of control flow instructions (e.g., if/else branches and loops).
In addition, the team developed a dual-issue variant of the processor, incorporating two parallel pipelines that enable simultaneous execution of two instructions per pipeline stage, further boosting performance.
Functionality and performance were validated through simulation and benchmarking using CoreMark, a widely adopted standard for embedded system performance evaluation. This project demonstrates the practical integration of computer architecture principles in the design of efficient, FPGA-based processor systems.
The team consists of ECE students (Tan Hsien Rong, Ou Ningxiang & Ellia Tio Shu Yi).
EE1111A: Smart Streetlamp with DC-DC Boost Converter
 This project focuses on the design and implementation of a smart streetlamp powered by a DC-DC boost converter. The system incorporates a light sensor to detect ambient light levels, ensuring the lamp is activated only when the surrounding illumination falls below a predefined threshold. An Arduino Uno serves as the central controller, processing sensor input to regulate the MOSFET switch within the boost converter, thereby managing the operation of the LED array. To enhance the project’s real-world applicability, we designed and 3D-printed a base, a protective casing for the boost converter, and a structural frame to support the LED unit. Additionally, aesthetic elements such as artificial grass, dirt, and a miniature park bench were incorporated to create a realistic prototype display.
This project focuses on the design and implementation of a smart streetlamp powered by a DC-DC boost converter. The system incorporates a light sensor to detect ambient light levels, ensuring the lamp is activated only when the surrounding illumination falls below a predefined threshold. An Arduino Uno serves as the central controller, processing sensor input to regulate the MOSFET switch within the boost converter, thereby managing the operation of the LED array. To enhance the project’s real-world applicability, we designed and 3D-printed a base, a protective casing for the boost converter, and a structural frame to support the LED unit. Additionally, aesthetic elements such as artificial grass, dirt, and a miniature park bench were incorporated to create a realistic prototype display.
The team consists of ECE students (Tan Kenshin, Wee Jun Bin, Ooi Michael, Tan Kerwin, Wang Zi Han & Yap Faith).
EE2026: FPGraph: A VGA-Based Fixed-Point Interactive Graphing Calculator implemented with FPGA
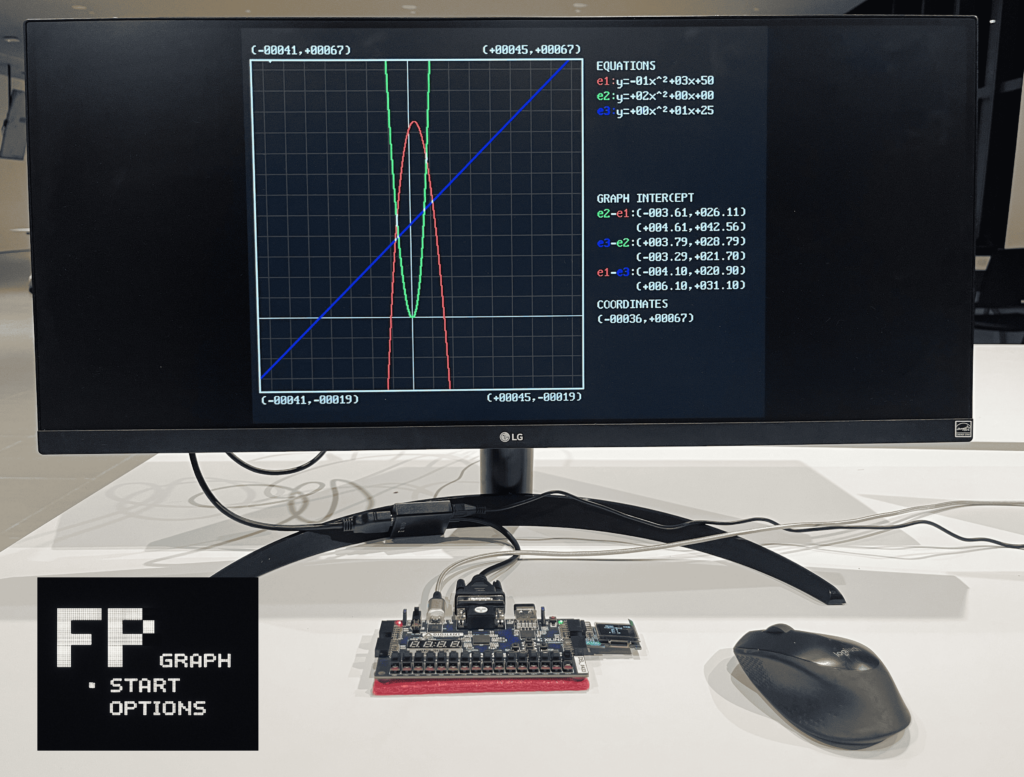 FPGraph is a fully hardware designed graphing calculator based on the Artix-7 Field Programmable Gate Array (FPGA). It can plot polynomial functions in real time with Video Graphics Array (VGA) output. It features a custom fixed-point arithmetic system to perform precise arithmetic manipulation as well as Newton-Raphson-based square root approximation.
FPGraph is a fully hardware designed graphing calculator based on the Artix-7 Field Programmable Gate Array (FPGA). It can plot polynomial functions in real time with Video Graphics Array (VGA) output. It features a custom fixed-point arithmetic system to perform precise arithmetic manipulation as well as Newton-Raphson-based square root approximation.
The system graphs up to three user-input equations simultaneously, leveraging parallelized hardware modules to avoid timing bottlenecks. It calculates graph intersections, x- and y-intercepts in real time, with rounded values displayed on a dynamic sidebar powered by a Read Only Memory (ROM) based VGA font engine. We also support zooming and panning with a mouse, computed via arithmetic translation and scaling of screen coordinates. A user menu implemented on the Organic Light-Emitting Diode (OLED) display provides a custom number pad interface for coefficient inputs.
By combining low-level VGA timing control, scalable arithmetic logic, and modular visual rendering, FPGraph demonstrates a comprehensive, real-time digital system for mathematical visualization on constrained digital hardware.
The team consists of ECE students (Irfan Deen, Ethan Chan, Wong Yi Hao & Teh Ze Xue).
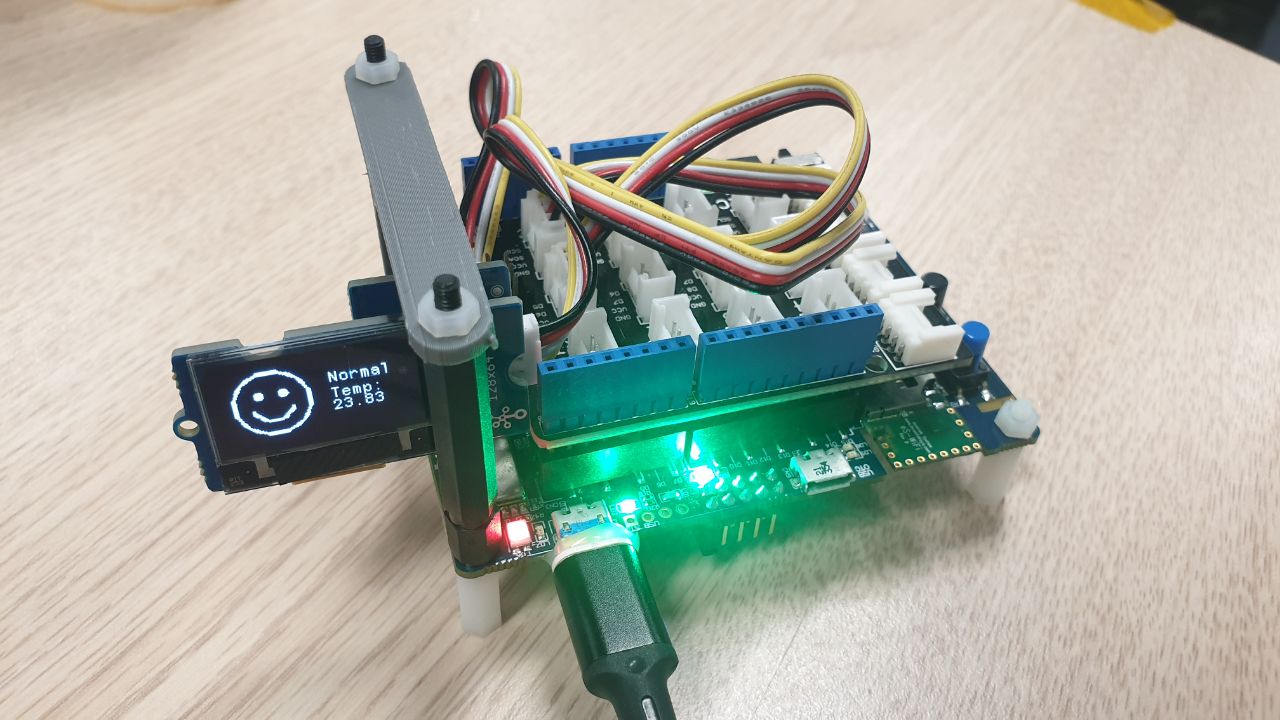
EE2028: ABUELA (Advanced Behavioral Unit for Elderly Life and Assistance)
 In response to the growing need for real-time elderly monitoring, a team of students developed a prototype "smart watch" as part of their final project for EE2028 Microprocessor Programming. Built on the STM32 IoT breakout board, the wearable integrates environmental and physiological sensors to detect falls, abnormal postures, and fevers.
In response to the growing need for real-time elderly monitoring, a team of students developed a prototype "smart watch" as part of their final project for EE2028 Microprocessor Programming. Built on the STM32 IoT breakout board, the wearable integrates environmental and physiological sensors to detect falls, abnormal postures, and fevers.
The device is supported by an interactive web interface, enabling caregivers to monitor seniors remotely and receive real-time alerts on critical health indicators. Designed with elderly individuals, their caregivers, and healthcare professionals in mind, this solution enhances safety, responsiveness, and peace of mind for all parties involved.
The team consists of ECE students (Choi Sangwoo & Tan Jiamin).
EE2028: Wearable Health Monitoring Device
 As part of the EE2028 Microprocessor Programming project, students developed a wearable health monitoring device equipped with key functionalities such as step counting, fall detection, fever monitoring, and posture tracking. The device aims to support elderly care by providing real-time health insights and enhancing remote monitoring capabilities for caregivers and medical professionals.
As part of the EE2028 Microprocessor Programming project, students developed a wearable health monitoring device equipped with key functionalities such as step counting, fall detection, fever monitoring, and posture tracking. The device aims to support elderly care by providing real-time health insights and enhancing remote monitoring capabilities for caregivers and medical professionals.
The team consists of ECE students (Loke Wan Ching & Tan Kai Cong).
EE4218: End-to-End Hardware Acceleration of a Convolutional Neural Network on FPGA
 This project presents the design and implementation of a hardware co-processor for end-to-end acceleration of Convolutional Neural Network (CNN) inference on a Field-Programmable Gate Array (FPGA). Deployed on the Xilinx Kria KV260 Development Platform, the co-processor interfaces with the platform’s on-board CPU via an AXI-Stream protocol, enabling computationally intensive CNN workloads to be offloaded to hardware. This not only frees up CPU resources but also exploits the inherent parallelism of FPGA architectures to achieve significant performance gains.
This project presents the design and implementation of a hardware co-processor for end-to-end acceleration of Convolutional Neural Network (CNN) inference on a Field-Programmable Gate Array (FPGA). Deployed on the Xilinx Kria KV260 Development Platform, the co-processor interfaces with the platform’s on-board CPU via an AXI-Stream protocol, enabling computationally intensive CNN workloads to be offloaded to hardware. This not only frees up CPU resources but also exploits the inherent parallelism of FPGA architectures to achieve significant performance gains.
Two hardware design methodologies are explored: (1) Register Transfer Level (RTL) implementation using Verilog, and (2) High-Level Synthesis (HLS) using the Vitis HLS toolchain. Quantisation-Aware Training (QAT) is employed during model preparation to reduce model size while maintaining inference accuracy.
The accelerator is validated using the QuickDraw and MNIST datasets, achieving a 283× and 377× speed-up in inference time using the RTL and HLS implementations respectively, when compared to CPU-only execution on the KV260 platform. These results demonstrate the effectiveness of hardware-based deep learning acceleration and the potential of FPGA platforms for efficient real-time inference applications.
The team consists of ECE students (Tan Hsien Rong & Ou Ningxiang).
EE4218: Neural Co-Processor Based Computer System
 The goal of this project is to create a neural co-processor based computer system, in this case a hardware accelerator for a Multi Layer Perceptron (MLP) Neural Network. This is implemented in software, HLS (High Level Synthesis), and HDL (Hardware Description Language on the Kria KV260 Vision AI Starter Kit, using cutting-edge tools such as PYNQ, FINN, and much more. This hardware accelerator would be demonstrated on the MNIST dataset, and the time taken for classification between the 3 predictors would be compared to showcase the performance speedup.
The goal of this project is to create a neural co-processor based computer system, in this case a hardware accelerator for a Multi Layer Perceptron (MLP) Neural Network. This is implemented in software, HLS (High Level Synthesis), and HDL (Hardware Description Language on the Kria KV260 Vision AI Starter Kit, using cutting-edge tools such as PYNQ, FINN, and much more. This hardware accelerator would be demonstrated on the MNIST dataset, and the time taken for classification between the 3 predictors would be compared to showcase the performance speedup.
The team consists of ECE students (Chan Zhun Mun Terence, Liu Jiaquan & Lim Yu An).
MSc Projects
-
The showcase should ideally include a live demonstration of the system.
-
The evaluation criteria include technical complexity and depth, ingenuity, the broader implication of the project, presentation skills, etc.
-
A printed or displayed visual aid is optional. If included, it will serve only to aid in the explanation and will not be evaluated.
Analysis of Memory-Runtime Trade-offs in Caching Strategies for Genetic Programming Symbolic Regression
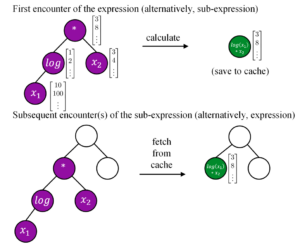 Genetic Programming Symbolic Regression (GPSR) generates mathematical expressions to model input-output relationships using an evolutionary process. A significant challenge in GPSR lies in the repeated evaluation of entire expressions or their sub-expression, which inflates computational runtime. To address this inefficiency, caching mechanisms have been employed to reduce redundant computations. However, prior studies predominantly employ a single caching strategy, offering limited insights into their comparative performance or memory-runtime trade-offs. In this paper, we present a comprehensive analysis of caching mechanisms for GPSR on synthetic and real-world datasets. We also include an empirical study of key-value usage frequencies under an infinitely large cache, offering insights into optimal cache sizing. Furthermore, we provide actionable guidelines for configuring caching strategies based on computational and memory constraints. Our findings indicate that complex caching mechanisms necessitate a minimum cache size to achieve computational time reductions. Conversely, lightweight caching strategies, such as Least Recently Used (LRU) and, notably, First-In-First-Out (FIFO), can significantly decrease computation time for fitness evaluations, which are a substantial component of the overall runtime.
Genetic Programming Symbolic Regression (GPSR) generates mathematical expressions to model input-output relationships using an evolutionary process. A significant challenge in GPSR lies in the repeated evaluation of entire expressions or their sub-expression, which inflates computational runtime. To address this inefficiency, caching mechanisms have been employed to reduce redundant computations. However, prior studies predominantly employ a single caching strategy, offering limited insights into their comparative performance or memory-runtime trade-offs. In this paper, we present a comprehensive analysis of caching mechanisms for GPSR on synthetic and real-world datasets. We also include an empirical study of key-value usage frequencies under an infinitely large cache, offering insights into optimal cache sizing. Furthermore, we provide actionable guidelines for configuring caching strategies based on computational and memory constraints. Our findings indicate that complex caching mechanisms necessitate a minimum cache size to achieve computational time reductions. Conversely, lightweight caching strategies, such as Least Recently Used (LRU) and, notably, First-In-First-Out (FIFO), can significantly decrease computation time for fitness evaluations, which are a substantial component of the overall runtime.
The project was developed by ECE student (Shi Jiaming).
Exploring the Design and Abilities of Multi-Agent LLM Systems
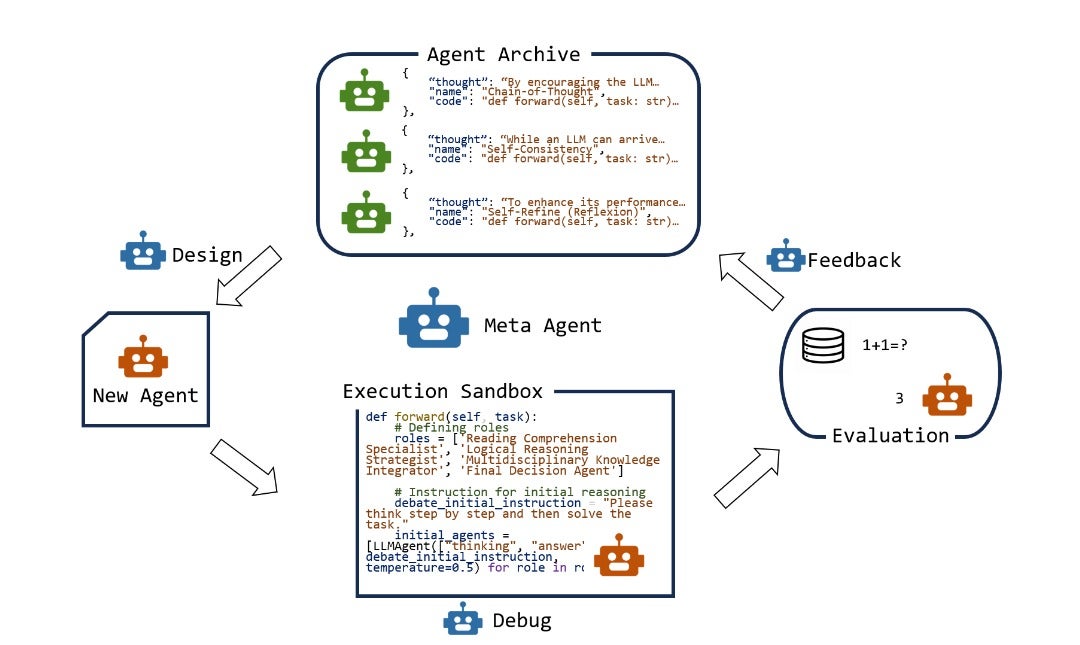 Multi-agent LLM system is a widely researched method to enhance the ability of LLMs through the collaboration of multiple LLM agents. In this project, we developed a efficent "Meta Agent" to automatically explore and design effective new multi-agent LLM system. The meta agent is a manully coded agentic LLM system that equipped with multi-agent designing knowledge and debugging ability. It can automatically code, debug and evaluate a new multi-agent LLM system that even exceeds human designed SOTA systems in certain aspects.
Multi-agent LLM system is a widely researched method to enhance the ability of LLMs through the collaboration of multiple LLM agents. In this project, we developed a efficent "Meta Agent" to automatically explore and design effective new multi-agent LLM system. The meta agent is a manully coded agentic LLM system that equipped with multi-agent designing knowledge and debugging ability. It can automatically code, debug and evaluate a new multi-agent LLM system that even exceeds human designed SOTA systems in certain aspects.
The project was developed by ECE student (Li Hanyang).
Exploring the Mechanistic Interpretability of Large Models Using Sparse Autoencoders
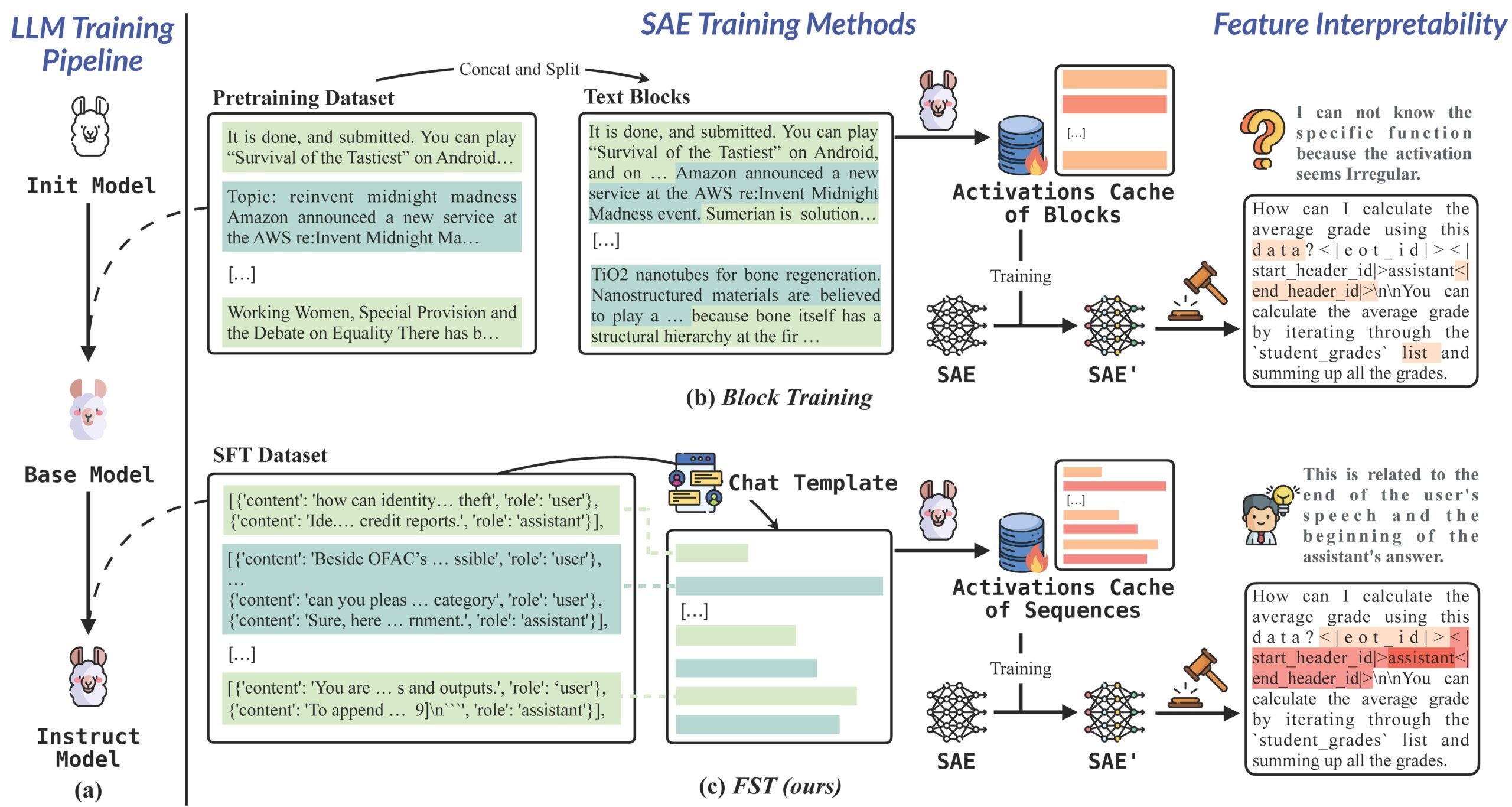 In recent years, training SAE models to explore LLM interpretability has become mainstream, with companies like OpenAI and Anthropic confirming the viability of dictionary learning SAEs. However, our project identifies a critical limitation in current SAE training approaches: when training SAEs for fine-tuned models, previous research largely continues to use methods designed for pre-trained models (splitting training corpora by fixed context size and using pre-training datasets), failing to align with human instruction datasets.
In recent years, training SAE models to explore LLM interpretability has become mainstream, with companies like OpenAI and Anthropic confirming the viability of dictionary learning SAEs. However, our project identifies a critical limitation in current SAE training approaches: when training SAEs for fine-tuned models, previous research largely continues to use methods designed for pre-trained models (splitting training corpora by fixed context size and using pre-training datasets), failing to align with human instruction datasets.
To address this issue, we propose the FST (Finetuning Sequence Training) architecture, which incorporates instruction-tuned datasets for SAE training. Our experiments demonstrate the superiority of FST in training instruction models' SAEs from both reconstruction capability and human interpretability perspectives. Additionally, we discovered several interesting features related to question-answering patterns, providing new insights into the model's internal representations.
The project was developed by ECE student (Ye Haoran).
Full-body Planning and Control of an Aerial Manipulator
 This project focuses on the design and control of aerial manipulators (AMs)—multi-rotor drones equipped with robotic arms—for applications such as transportation and construction. Traditional control methods simplify dynamics by assuming slow arm motion and negligible payload effects, limiting performance in fast-motion tasks. To overcome this, we develop a full-body control approach that accounts for coupled dynamics. Additionally, an adaptive controller compensates for payload variations and external disturbances, enhancing robustness. This enables the AM to achieve superior agility and maneuverability, surpassing existing solutions and expanding its applicability in dynamic environments.
This project focuses on the design and control of aerial manipulators (AMs)—multi-rotor drones equipped with robotic arms—for applications such as transportation and construction. Traditional control methods simplify dynamics by assuming slow arm motion and negligible payload effects, limiting performance in fast-motion tasks. To overcome this, we develop a full-body control approach that accounts for coupled dynamics. Additionally, an adaptive controller compensates for payload variations and external disturbances, enhancing robustness. This enables the AM to achieve superior agility and maneuverability, surpassing existing solutions and expanding its applicability in dynamic environments.
The team consists of ECE students (Lei He, Neow Bo Kai, Yongxin Tang & Mingrui Li).
Machine Learning-Assisted CMOS-Compatible Metamaterial Resonator for Enhanced Molecular Sensing
 In this study, a CMOS-compatible metamaterial resonator is proposed and presented for enhanced molecular sensing in the mid-infrared region. The designed resonator structure is optimized to achieve high sensitivity and selectivity toward biological analytes. Additionally, a machine learning framework, incorporating the dimensionality reduction and supervised classification algorithms, is implemented to identify and distinguish spectral fingerprints with high precision and is integrated to analyze the spectral response and classify the biomolecular signatures with high accuracy. The combined approach manifests a promising pathway for label-free, high-precision biosensing applications using scalable and industry-compatible technologies. And also this comprehensive approach demonstrates a label-free, highly accurate, and scalable biosensing solution with good industrial compatibility and application prospects.
In this study, a CMOS-compatible metamaterial resonator is proposed and presented for enhanced molecular sensing in the mid-infrared region. The designed resonator structure is optimized to achieve high sensitivity and selectivity toward biological analytes. Additionally, a machine learning framework, incorporating the dimensionality reduction and supervised classification algorithms, is implemented to identify and distinguish spectral fingerprints with high precision and is integrated to analyze the spectral response and classify the biomolecular signatures with high accuracy. The combined approach manifests a promising pathway for label-free, high-precision biosensing applications using scalable and industry-compatible technologies. And also this comprehensive approach demonstrates a label-free, highly accurate, and scalable biosensing solution with good industrial compatibility and application prospects.
The project was developed by ECE student (Chen Jiangtian).
External Competition Projects
Discover ECE students’ outstanding achievements in competitions beyond NUS!
3D Touchless Mouse
 A touchless mouse functions as a 3D interface, translating natural hand gestures into digital commands without physical contact. By capturing three-dimensional motion through sensors, it enables intuitive, hands-free interaction, enhancing user experience across various applications. This gesture-based interface simplifies navigation and control, making it especially valuable in sterile or high-focus environments. A notable use case is in surgery, where surgeons can manipulate imaging and settings without breaking sterility or relying on assistants. This improves precision, reduces workflow disruptions, and increases efficiency. Touchless UIs are also impactful in healthcare, automotive systems, and smart homes, offering seamless, contact-free control.
A touchless mouse functions as a 3D interface, translating natural hand gestures into digital commands without physical contact. By capturing three-dimensional motion through sensors, it enables intuitive, hands-free interaction, enhancing user experience across various applications. This gesture-based interface simplifies navigation and control, making it especially valuable in sterile or high-focus environments. A notable use case is in surgery, where surgeons can manipulate imaging and settings without breaking sterility or relying on assistants. This improves precision, reduces workflow disruptions, and increases efficiency. Touchless UIs are also impactful in healthcare, automotive systems, and smart homes, offering seamless, contact-free control.
Arielle
 The team developed Arielle (AR-based independent and experiential language learner on the edge), an AI-driven English language learning device for rural children, utiliszing Augmented Reality, Computer Vision, ASR, and Edge Computing. Their innovative solution showcases the power of technology in bridging educational gaps. The project won 1st place at the 2024 Intel Cup Undergraduate Embedded System Design Contest.
The team developed Arielle (AR-based independent and experiential language learner on the edge), an AI-driven English language learning device for rural children, utiliszing Augmented Reality, Computer Vision, ASR, and Edge Computing. Their innovative solution showcases the power of technology in bridging educational gaps. The project won 1st place at the 2024 Intel Cup Undergraduate Embedded System Design Contest.
The team consists of CEG students (Man Juncheng & Hong Lin Shang) and EE student (Ellia Tio Shu Yi).
Augmented Rosyth – A Community-Farm Learning Complex
 A team of students from the National University of Singapore (NUS) has achieved outstanding success at the HOME International Building Design Competition (IBDC) 2024. ECE students, alongside their interdisciplinary team, secured 3rd place with their forward-thinking project, “Augmented Rosyth – A Community-Farm Learning Complex.”
A team of students from the National University of Singapore (NUS) has achieved outstanding success at the HOME International Building Design Competition (IBDC) 2024. ECE students, alongside their interdisciplinary team, secured 3rd place with their forward-thinking project, “Augmented Rosyth – A Community-Farm Learning Complex.”
Their project envisions a future educational environment where campuses evolve into hybrid learning spaces that emphasize flexibility, personalization, and well-being. As remote learning gains traction with advancements in augmented reality (AR), virtual reality (VR), and smart-glasses technologies, their design proposes a mixed-use campus featuring expansive green spaces, meditation rooftops, and tree-top huts. These elements aim to foster a balanced integration of academic learning and community engagement. The project reimagines traditional educational settings as dynamic, multi-functional spaces that cater to both students and the broader community.
The team consists of ECE students (Wan Jiacheng & Wang Silang).
DroneGuard: Real-Time Drone Detection Using SDR & Edge AI

NUS Calibur Robotic Engineer
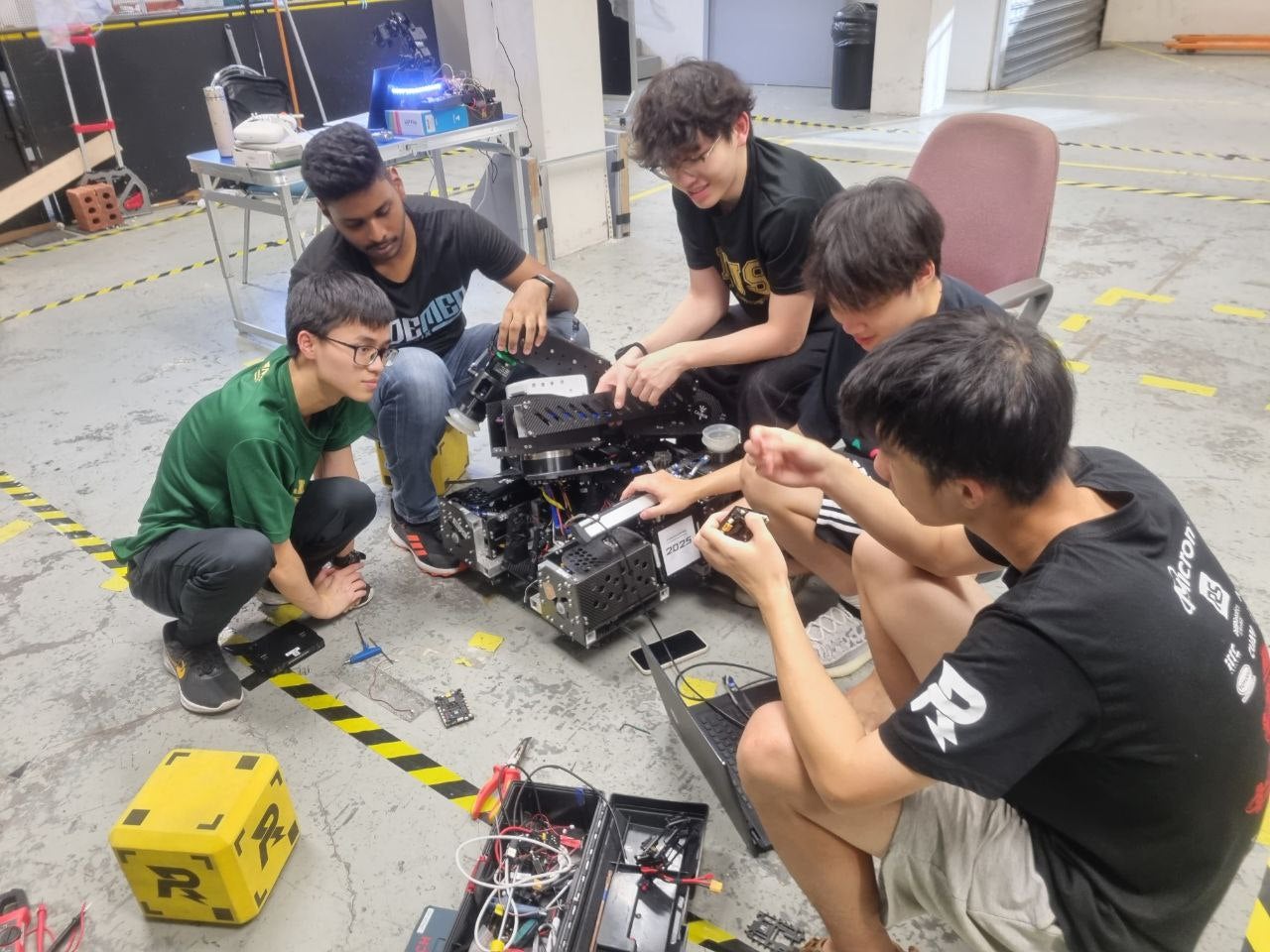 As part of its latest innovations, the team is developing a robotic system featuring two 6-DOF robotic arms for mineral collection and transportation, designed specifically for RoboMaster Calibur. A custom master-slave control system has been implemented, where a master arm transmits precise control signals to a slave engineer arm, ensuring synchronized motion. Built entirely from scratch, both the hardware and software are tailored for high-performance competition scenarios. The team’s ultimate goal is to fully deploy a set of seven cutting-edge, specialized robots to compete in the global championships held annually in Shenzhen, China.
As part of its latest innovations, the team is developing a robotic system featuring two 6-DOF robotic arms for mineral collection and transportation, designed specifically for RoboMaster Calibur. A custom master-slave control system has been implemented, where a master arm transmits precise control signals to a slave engineer arm, ensuring synchronized motion. Built entirely from scratch, both the hardware and software are tailored for high-performance competition scenarios. The team’s ultimate goal is to fully deploy a set of seven cutting-edge, specialized robots to compete in the global championships held annually in Shenzhen, China.
The team consists of ECE students (Li Shunyang & Hu Hongheng).
NUS Calibur 2-Legged Wheel-Balancing Robot
 This project features a two-legged, wheel-balancing robot equipped with a gimbal-mounted ball launcher. Designed to support modular attachments while maintaining balance, the robot has been in development since the 2024 RoboMaster University League (RMUL) and is being prepared for the 2025 RoboMaster University Championship (RMUC).
This project features a two-legged, wheel-balancing robot equipped with a gimbal-mounted ball launcher. Designed to support modular attachments while maintaining balance, the robot has been in development since the 2024 RoboMaster University League (RMUL) and is being prepared for the 2025 RoboMaster University Championship (RMUC).
The robot’s innovative design includes six motors—four for leg articulation and two for wheeled mobility—allowing dynamic height adjustment, obstacle navigation, and enhanced maneuverability. Its balance is controlled by a Linear Quadratic Regulator (LQR), with gain matrices pre-calculated using MATLAB and implemented on a microcontroller for stable operation. While optimized for competition, the platform holds promise for broader applications, including assistive robotics.
The project was developed by ECE student (Lo Yi Ming).
Snoring Detection: A Hybrid Approach with Random Forest and SVM
 Under the CDE2605R Undergraduate Research Experience (UREx), a group of students developed a machine learning framework for snoring classification. Given the significant impact of snoring on human health, this study aims to enhance detection accuracy using an optimized classification model.
Under the CDE2605R Undergraduate Research Experience (UREx), a group of students developed a machine learning framework for snoring classification. Given the significant impact of snoring on human health, this study aims to enhance detection accuracy using an optimized classification model.
The proposed framework utilizes Mel-Frequency Cepstral Coefficients (MFCCs) and Zero-Crossing Rate (ZCR) as key features for snoring sound detection. To improve the efficiency of a Support Vector Machine (SVM) classifier, the study employs the Random Forest (RF) algorithm not only as a classifier but also as a feature selection tool, leveraging its Gini importance measure. The refined feature set is then used to train an SVM classifier with a Radial Basis Function (RBF) kernel. This stacked model, integrating both SVM and RF, achieved a classification accuracy improvement from 85% to 95%, demonstrating the effectiveness of ensemble learning in enhancing prediction accuracy and efficiency.
While the study confirms the robustness of the SVM-RF model for snoring classification, further research will focus on refining AI-based approaches to achieve even greater accuracy and reliability in snoring detection.
The team consists of ECE students (Huang Wanqi & Chen Xuanyi).
VerdyHive
Explore Student Innovations Submitted to the Espressif Competition!
AIoT Lighting System for Urban Farm to Reduce Energy Consumption and Customized Lighting Recipe
One of the main aspects of urban indoor farming is lighting. Depending on the stage of growth of the plant or the size of its leaves, the lighting combination or intensity has to be manually changed for the plant to receive the optimal dose of light to properly grow. Therefore, the team aims to automate this process, reducing the need for manual intervention. The team plans to develop an AIoT lighting system that would change according to the size of the plant’s leaves or the growth stage of the plant (germination or vegetative state). While lighting is crucial for indoor farming, it is also the primary driver of high energy consumption. This project not only aims to automates the process to reduce manual intervention but also to address the high energy consumption issues in lighting and to explore possible optimisations in other areas. This final year project will focus on automating the system by experimenting with various techniques such as better image uploading to the cloud and image processing on the cloud. This project will also explore different methods to enhance energy efficiency by improving the ESP32-CAM operations and using a dynamic lighting system.
The team consists of ECE students (Lam You Sheng, Ong Qing En & Tan Jun Jie).
Biofeedback and Freezing of Gait Prediction for Parkinson Disease Patients
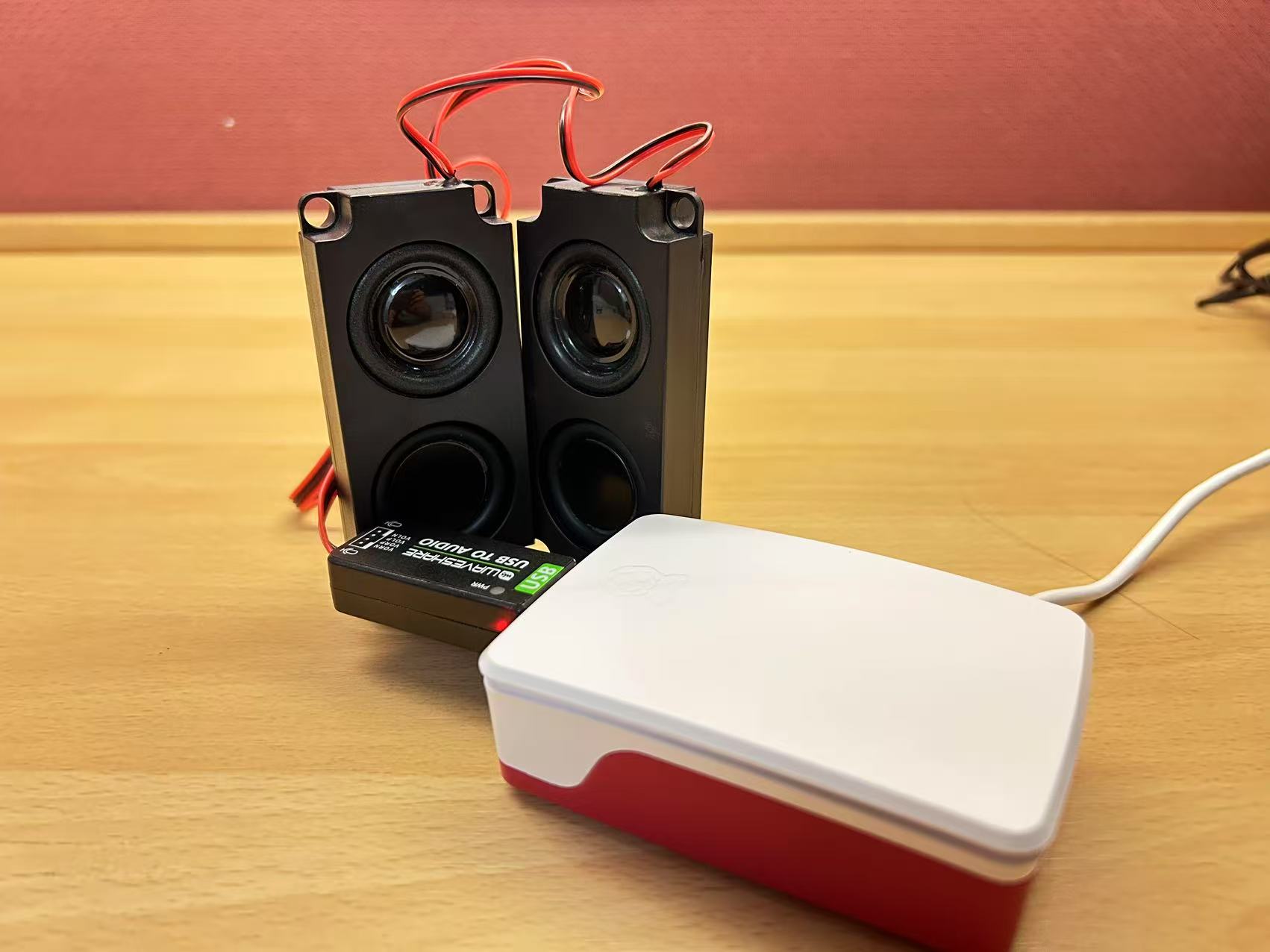
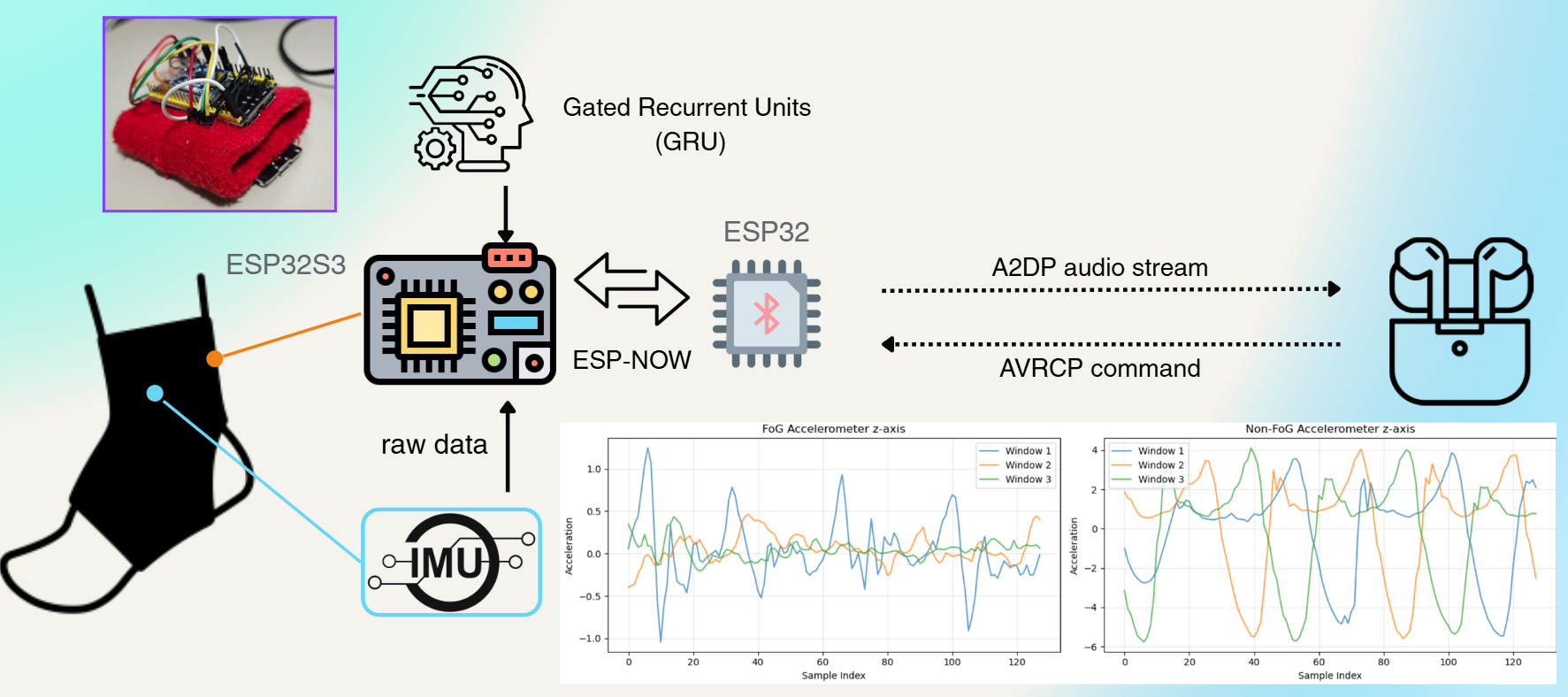 This project develops a wearable system to detect Freezing of Gait (FoG) episodes in Parkinson's Disease patients, providing real-time biofeedback and adaptive assistance. FoG affects nearly 40% of PD patients, causing them to feel as if their feet are "glued" to the ground, increasing fall risk and worsening with disease progression. The system uses ESP32S3 and ESP32 microcontrollers with Inertial Measurement Units (IMUs) attached to the patient's ankles to monitor movement patterns. When FoG is detected, the system delivers immediate auditory cues through Bluetooth earphones to help patients break the freezing episode. After evaluating multiple machine learning models, a Gated Recurrent Unit (GRU) architecture was implemented, achieving 90% sensitivity and 91% specificity while maintaining efficiency for embedded deployment on resource-constrained devices. The system features bidirectional communication—allowing patients to provide feedback through the earphone controls—which helps reduce false alarms and improve model accuracy over time. Unlike existing solutions that require external computing devices, this completely productized system operates autonomously, processing data and executing inferences directly on the wearable device. The dual-ESP architecture overcomes hardware limitations, with ESP-NOW protocol enabling fast communication between components to deliver timely interventions that help patients maintain mobility in everyday life.
This project develops a wearable system to detect Freezing of Gait (FoG) episodes in Parkinson's Disease patients, providing real-time biofeedback and adaptive assistance. FoG affects nearly 40% of PD patients, causing them to feel as if their feet are "glued" to the ground, increasing fall risk and worsening with disease progression. The system uses ESP32S3 and ESP32 microcontrollers with Inertial Measurement Units (IMUs) attached to the patient's ankles to monitor movement patterns. When FoG is detected, the system delivers immediate auditory cues through Bluetooth earphones to help patients break the freezing episode. After evaluating multiple machine learning models, a Gated Recurrent Unit (GRU) architecture was implemented, achieving 90% sensitivity and 91% specificity while maintaining efficiency for embedded deployment on resource-constrained devices. The system features bidirectional communication—allowing patients to provide feedback through the earphone controls—which helps reduce false alarms and improve model accuracy over time. Unlike existing solutions that require external computing devices, this completely productized system operates autonomously, processing data and executing inferences directly on the wearable device. The dual-ESP architecture overcomes hardware limitations, with ESP-NOW protocol enabling fast communication between components to deliver timely interventions that help patients maintain mobility in everyday life.Design and Implement IoT Network Testbed
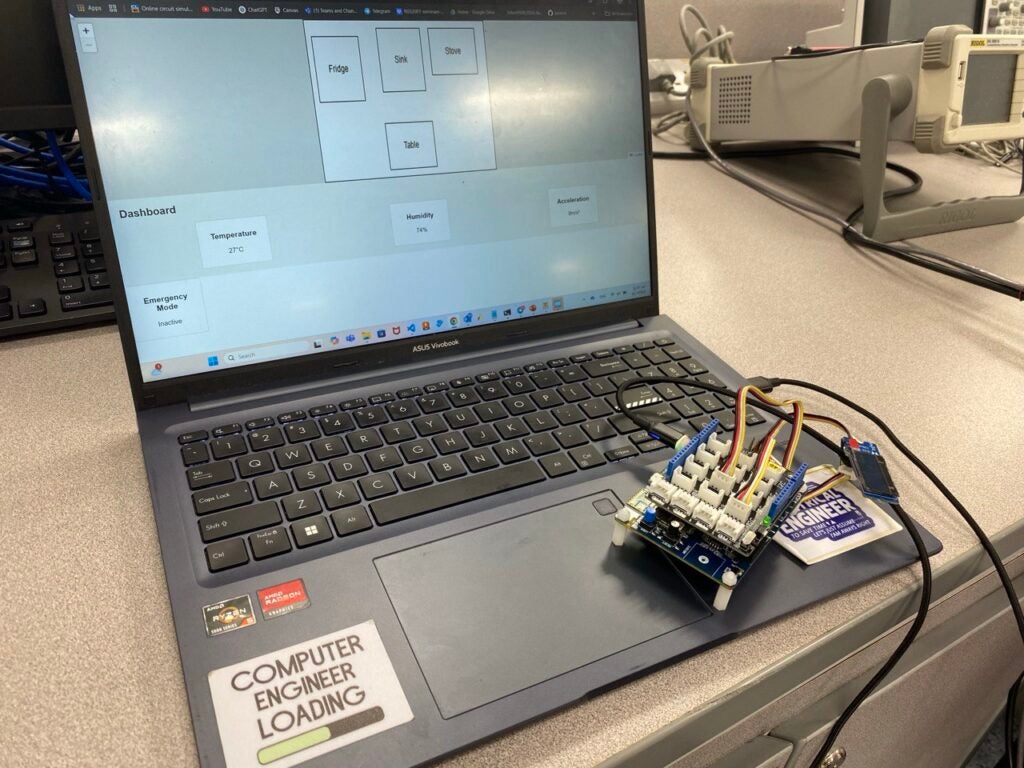
 Signals generated from systems contain a wealth of valuable information that can be leveraged to better understand and optimize those systems. This is why the application of the Internet of Things (IoT) is becoming increasingly important. With the availability of high-capacity wireless connections and hardware platforms, various IoT applications, such as smart homes, smart cities, urban farming, and industrial applications, are being explored in academia and industry. Sensors can be embedded in different contexts to retrieve information about unknown effects. For example, pressure sensors can be placed in concrete to collect rebar erosion data, which can be analyzed to improve concrete production processes. A functional IoT network requires the integration of both hardware and software components. Hardware components include sensors, actuators, gateways, and servers, while software components include server routines, data analysis packages, user data visualization web and smart device apps, and gateway access apps. Most IoT network applications include these components. This project aims to develop a prototype IoT network testbed that implements the aforementioned components and provides both academia and industry users with an interface to customize the system to fit their specific needs. The student team will have access to various hardware and software tools, such as ESP32 and Rainmaker, to implement network and data servers, sensor nodes, gateways, user interfaces, and smart device apps.
Signals generated from systems contain a wealth of valuable information that can be leveraged to better understand and optimize those systems. This is why the application of the Internet of Things (IoT) is becoming increasingly important. With the availability of high-capacity wireless connections and hardware platforms, various IoT applications, such as smart homes, smart cities, urban farming, and industrial applications, are being explored in academia and industry. Sensors can be embedded in different contexts to retrieve information about unknown effects. For example, pressure sensors can be placed in concrete to collect rebar erosion data, which can be analyzed to improve concrete production processes. A functional IoT network requires the integration of both hardware and software components. Hardware components include sensors, actuators, gateways, and servers, while software components include server routines, data analysis packages, user data visualization web and smart device apps, and gateway access apps. Most IoT network applications include these components. This project aims to develop a prototype IoT network testbed that implements the aforementioned components and provides both academia and industry users with an interface to customize the system to fit their specific needs. The student team will have access to various hardware and software tools, such as ESP32 and Rainmaker, to implement network and data servers, sensor nodes, gateways, user interfaces, and smart device apps.Development of AIOT Sensing System for Food Resilience and Sustainability
In the current world, the population is growing rapidly but the food production is not. There is estimation from world economist that we will experience food shortage as early as 2030. Hence, many scientists and researchers are looking to introduce modern technologies into the food production industries, namely agrifood. Currently, Singapore is launching a nationwide program to meet with the food shortage crisis by 2030. The aim of the proposed project is to design and develop a system for food resilience such as agritech food safety and human health . The team will need to develop an IOT system based on available setup and monitor the agrifood environment. This IOT system will be connected to cloud to communicate with the farm system via wifi. Student requirement includes knowledge of python and java, as well as some AI/ML programming knowledge. Hardware is also developed in this project. The student will also work closely with NUS and SFA to develop the IOT for farm factory. The student will also work with companies for software development and cloud computing.Internet of Things (IoT) and Prescriptive Analytics for Industry 5.0
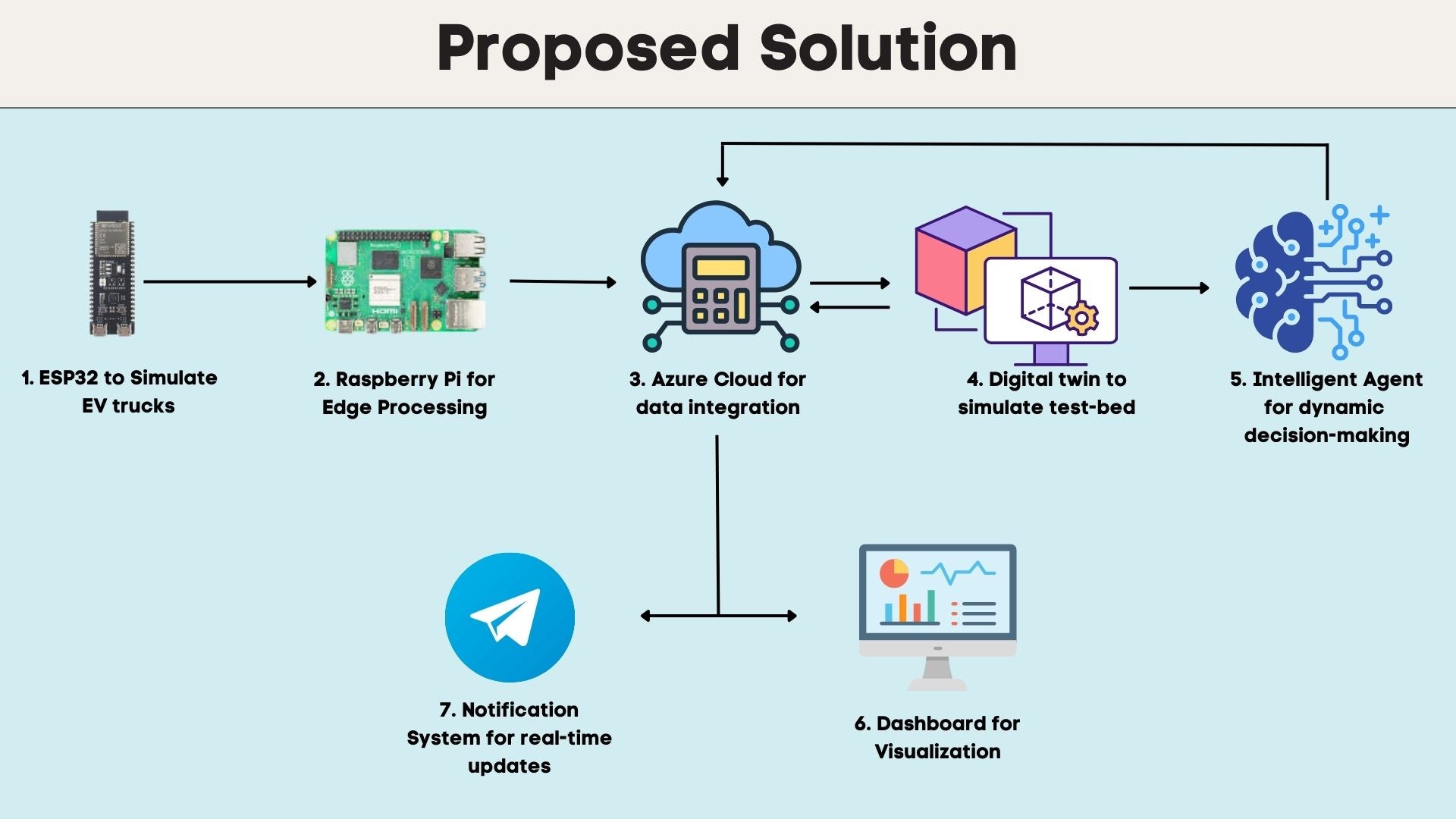 As Singapore pushes ahead with the Green Plan 2030, logistics firms face tough challenges in adopting electric vehicles. Our intelligent EV fleet management system addresses these head-on with advanced IoT and edge AI technologies.
As Singapore pushes ahead with the Green Plan 2030, logistics firms face tough challenges in adopting electric vehicles. Our intelligent EV fleet management system addresses these head-on with advanced IoT and edge AI technologies.
By combining real-time battery and performance monitoring with digital twin simulations (via AnyLogic and SimPy), our system models complex urban logistics scenarios unique to Singapore. Reinforcement learning dynamically optimizes routing and charging based on live data, while predictive maintenance minimizes downtime.
In pilot tests, the system has already delivered a 22% boost in delivery efficiency, reduced operational costs, and extended battery life—matching the reliability of diesel fleets.
This isn't a concept—it's a scalable, field-tested solution making sustainable logistics a practical reality in Singapore.
IoT-Based Urban Farming System
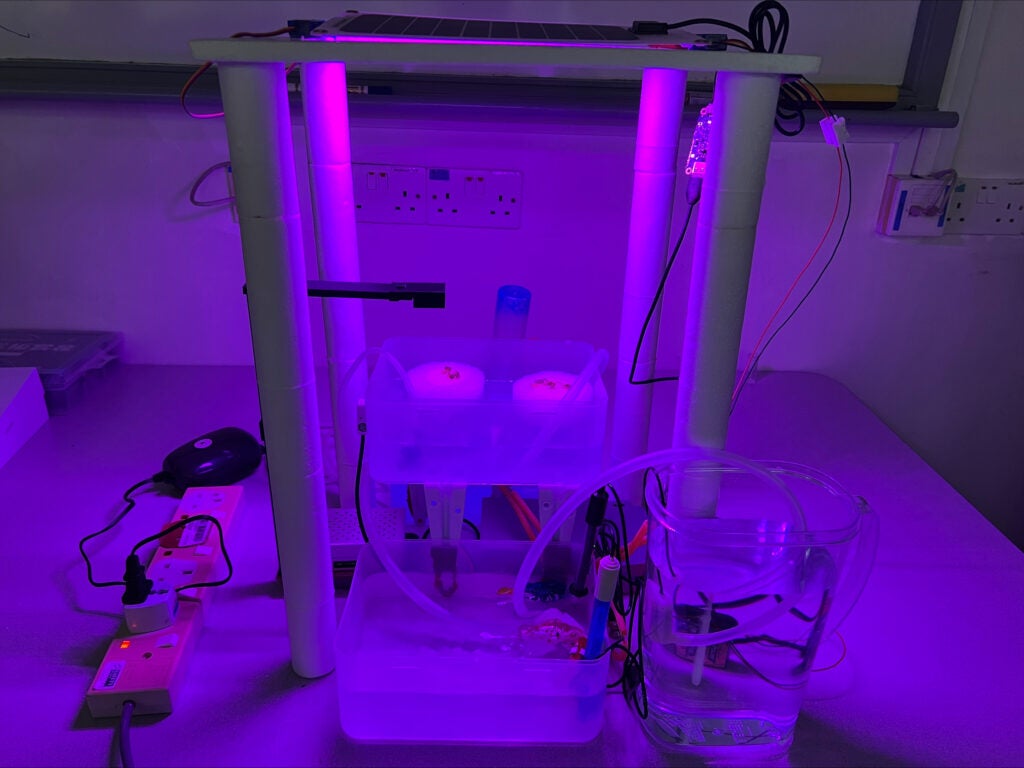 The IoT-enabled urban aquaponics system aim to addresses key challenges of high operating costs, limited space, and manpower constraints in Singapore’s urban farming scene. Inspired by both commercial vertical farms and aquaponics solutions, the project aims to optimise resource efficiency and support Singapore’s “30 by 30” food security goal. By integrating a multi-sensor network (for temperature, humidity, pH, and multispectral reflectance), the system continuously monitors environmental and crop parameters, transmitting data to a cloud platform for real-time analytics and visualisation. Automated actuation for watering, fertilisation, and lighting is triggered based on condition thresholds and vegetation indices (NDVI, NDWI, GCI). This helps maintain stable pH, nutrient concentration, and microclimate conditions with minimal manual intervention. A solar-powered module and battery management further reduce energy dependence, while an optional machine-learning component helps detect plant stress from camera images. Preliminary results show reduced labour requirements, improved data transparency, and consistent plant growth conditions even in a space-constrained environment. Overall, the system demonstrates how affordable IoT technologies, combined with vertical aquaponics, can enhance urban farming productivity and operational sustainability, thereby contributing to local food resilience.
The IoT-enabled urban aquaponics system aim to addresses key challenges of high operating costs, limited space, and manpower constraints in Singapore’s urban farming scene. Inspired by both commercial vertical farms and aquaponics solutions, the project aims to optimise resource efficiency and support Singapore’s “30 by 30” food security goal. By integrating a multi-sensor network (for temperature, humidity, pH, and multispectral reflectance), the system continuously monitors environmental and crop parameters, transmitting data to a cloud platform for real-time analytics and visualisation. Automated actuation for watering, fertilisation, and lighting is triggered based on condition thresholds and vegetation indices (NDVI, NDWI, GCI). This helps maintain stable pH, nutrient concentration, and microclimate conditions with minimal manual intervention. A solar-powered module and battery management further reduce energy dependence, while an optional machine-learning component helps detect plant stress from camera images. Preliminary results show reduced labour requirements, improved data transparency, and consistent plant growth conditions even in a space-constrained environment. Overall, the system demonstrates how affordable IoT technologies, combined with vertical aquaponics, can enhance urban farming productivity and operational sustainability, thereby contributing to local food resilience.
The team consists of ECE students (Lim Jia Xuan, Chan Ngok Hun, Timothy, Fan Chen & Dinh Quang Huy).
Personal Posture Reminder System (PPRS)
Poor sitting posture at the desk is very common among students and white-collar workers. Not only does it cause fatigue and reduce productivity, but it may also cause long-term injuries. Studies have also shown that leaning forward close to the device display or reading materials on the desk accelerates eyesight deterioration. This project aims to enable and encourage its users to self-correct their posture without the need to invest in expensive ergonomic furniture or contraptions. The key objective is to implement an affordable, robust, customizable, non-intrusive, and fairly accurate Personal Posture Reminder System (PPRS) that can easily be deployed whenever and wherever it is needed to help remind the user, at a preferred interval, of the correct posture at the desk via a mobile app. The small-sized, portable, easy-to-setup PPRS comprises a distance sensor, a webcam, a microcontroller (e.g. Raspberry Pi), an open-source cloud IoT analytics platform (e.g. Kaa IoT, ThingSpeak), and a simple mobile app (e.g. for iOS, Android). The distance sensor measures the distance between the user and the device display and relays it to the microcontroller. The webcam captures the user’s sitting posture at a regular interval. Based on this information, the microcontroller runs a posture monitoring algorithm and transfers only the essential data to the selected cloud IoT analytics platform for analysis, whose results are made available to the user via a mobile app. The basic version of PPRS should accurately announce if a particular posture is acceptable or not, indicated simply by green and red respectively, and play a warning tone if the user is too near to the device display (e.g. less than 50 cm), all on the simple mobile app. More functionalities can eventually be added in the enhanced version once the basic version is stable and the students are competent in developing the required PPRS hardware, software, cloud IoT analytics, and mobile app development.
The team consists of ECE students (Javier Soon Quanlong, Lim Changyi, Lee Ming Ren & Lim Qian Yi Jeamne).
LavSense: Smart Washroom Monitoring
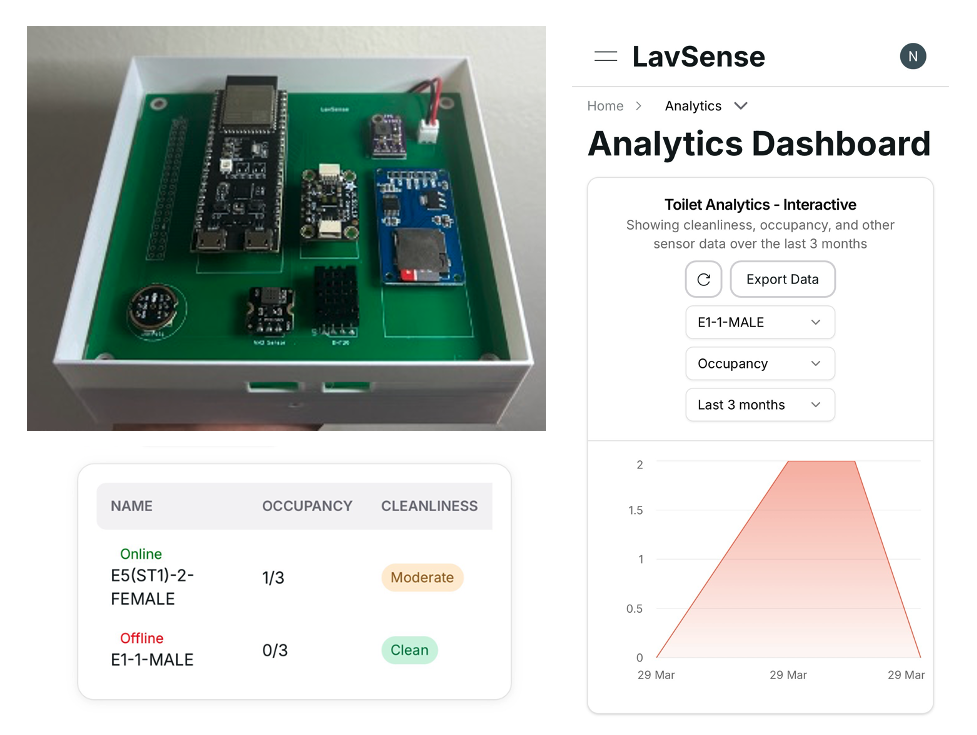 LavSense is an innovative smart washroom monitoring system leveraging IoT and machine learning technologies to enhance hygiene, safety, and user convenience. The system integrates various sensors to monitor washroom conditions such as occupancy, cleanliness, and leaks. Data from these sensors will be processed by machine learning algorithms, enabling efficient and real-time anomaly detection and predictive maintenance. The project also includes a user-friendly web application that displays real-time washroom conditions and occupancy, helping users find available facilities and providing maintenance alerts to staff.
LavSense is an innovative smart washroom monitoring system leveraging IoT and machine learning technologies to enhance hygiene, safety, and user convenience. The system integrates various sensors to monitor washroom conditions such as occupancy, cleanliness, and leaks. Data from these sensors will be processed by machine learning algorithms, enabling efficient and real-time anomaly detection and predictive maintenance. The project also includes a user-friendly web application that displays real-time washroom conditions and occupancy, helping users find available facilities and providing maintenance alerts to staff.
The team consists of ECE students (David Chong Joon Wei, Tan Cheng Wen, Rachel, Gladys Chua Fang Yi & Non Kittilakkananon).
Knowledge Sharing Projects
Fast But Accurate: A Real-Time Hyperelastic Simulator for Robot and Medical Application
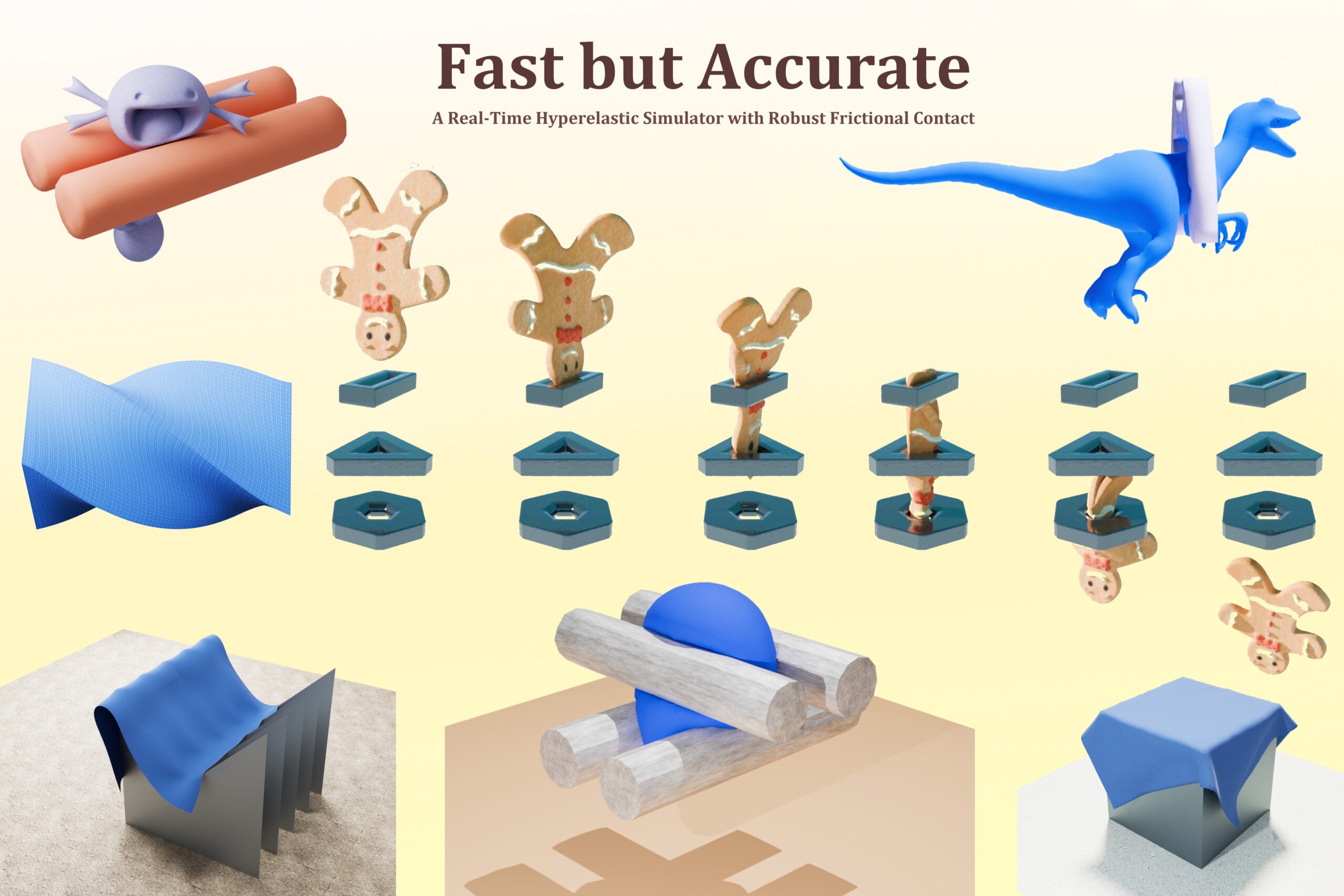 This project presents a GPU-optimized framework for real-time elastic simulation, designed to efficiently handle frictional contacts. While local-global interactive methods such as Projective Dynamics (PD) and ADMM-PD are widely used for simulating deformable objects, their structures are not inherently optimized for GPU acceleration. This work focuses on developing efficient numerical methods to parallelize the global steps while maintaining the fast convergence properties of local-global methods.
This project presents a GPU-optimized framework for real-time elastic simulation, designed to efficiently handle frictional contacts. While local-global interactive methods such as Projective Dynamics (PD) and ADMM-PD are widely used for simulating deformable objects, their structures are not inherently optimized for GPU acceleration. This work focuses on developing efficient numerical methods to parallelize the global steps while maintaining the fast convergence properties of local-global methods.
To address challenges in frictional contact simulation, the framework integrates non-smooth Newton methods into the global step constraints, ensuring stable enforcement of non-interpenetration and accurate friction modeling. Additionally, a novel splitting strategy for non-smooth indicators is introduced to enhance computational efficiency and reduce processing overhead.
With a fully GPU-based implementation, the framework enables high-resolution, real-time simulations of hyperelastic materials, including large-deformation objects with stable frictional interactions and cloth simulations with non-smooth contact handling.
The project was developed by ECE student (Luo Siyuan).
Fault-Tolerant Quadruped Locomotion Control
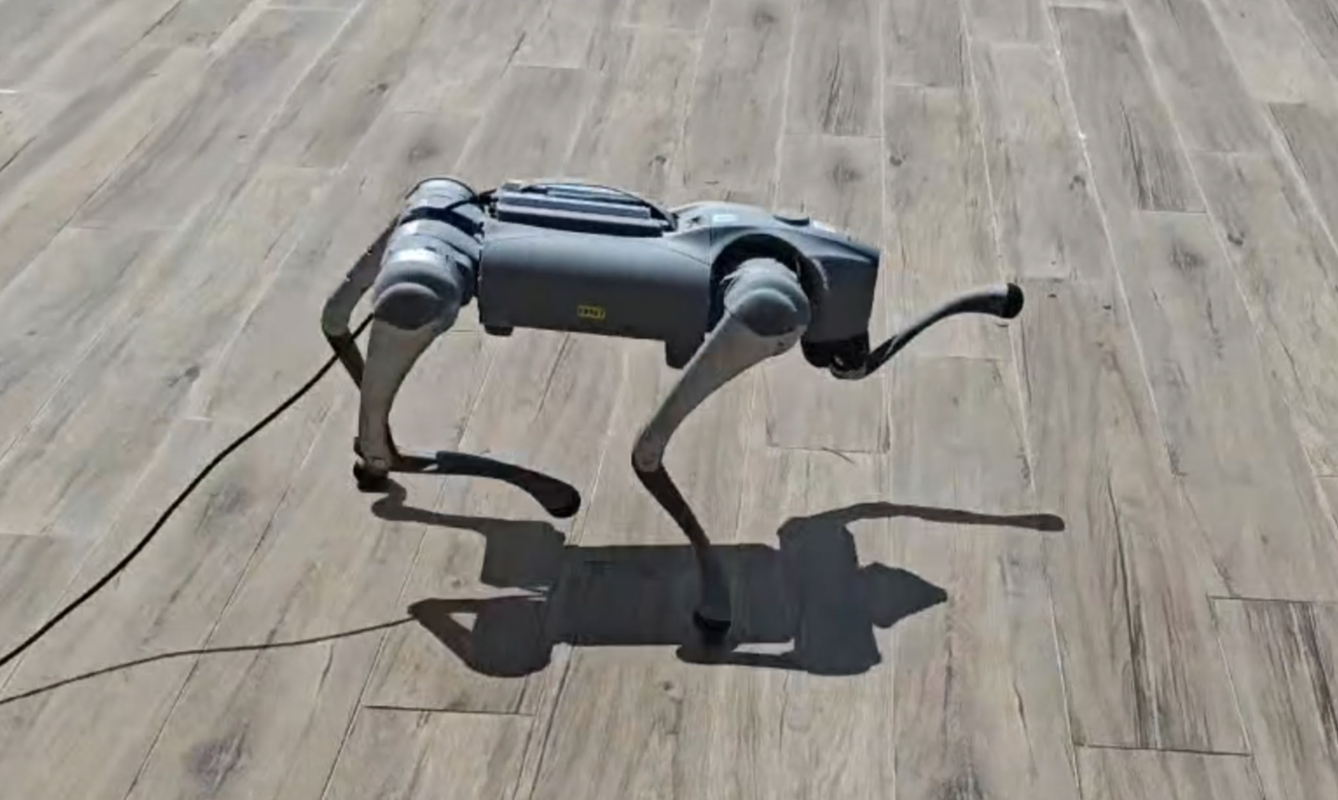 Quadrupedal robots can learn versatile locomotion skills but remain vulnerable when one or more joints lose power. In contrast, dogs and cats can adopt limping gaits when injured, demonstrating their remarkable ability to adapt to physical conditions. Inspired by such adaptability, we trained a fault-tolerant locomotion policy and the quadruped with our policy can walk with single- and double-joint faults, demonstrating fault-tolerant, stable walking, smooth gait transitions between norm
Quadrupedal robots can learn versatile locomotion skills but remain vulnerable when one or more joints lose power. In contrast, dogs and cats can adopt limping gaits when injured, demonstrating their remarkable ability to adapt to physical conditions. Inspired by such adaptability, we trained a fault-tolerant locomotion policy and the quadruped with our policy can walk with single- and double-joint faults, demonstrating fault-tolerant, stable walking, smooth gait transitions between norm
To address challenges in frictional contact simulation, the framework integrates non-smooth Newton methods into the global step constraints, ensuring stable enforcement of non-interpenetration and accurate friction modeling. Additionally, a novel splitting strategy for non-smooth indicators is introduced to enhance computational efficiency and reduce processing overhead.
With a fully GPU-based implementation, the framework enables high-resolution, real-time simulations of hyperelastic materials, including large-deformation objects with stable frictional interactions and cloth simulations with non-smooth contact handling.
The team consists of ECE students (Xu Tianyu, Cheng Yaoyu & Shen Pinxi).
Student-Run Team
Explore existing student-led project teams
NUS Bumblebee
 Bumblebee is a student-run, multi-disciplinary robotics team. The Bumblebee team designs and builds Autonomous Underwater Vehicles (AUVs) and Autonomous Surface Vessels (ASVs) to navigate across oceans independently, from the shore line and the water surface, to deep waters.
Bumblebee is a student-run, multi-disciplinary robotics team. The Bumblebee team designs and builds Autonomous Underwater Vehicles (AUVs) and Autonomous Surface Vessels (ASVs) to navigate across oceans independently, from the shore line and the water surface, to deep waters.
NUS Calibur Robotics
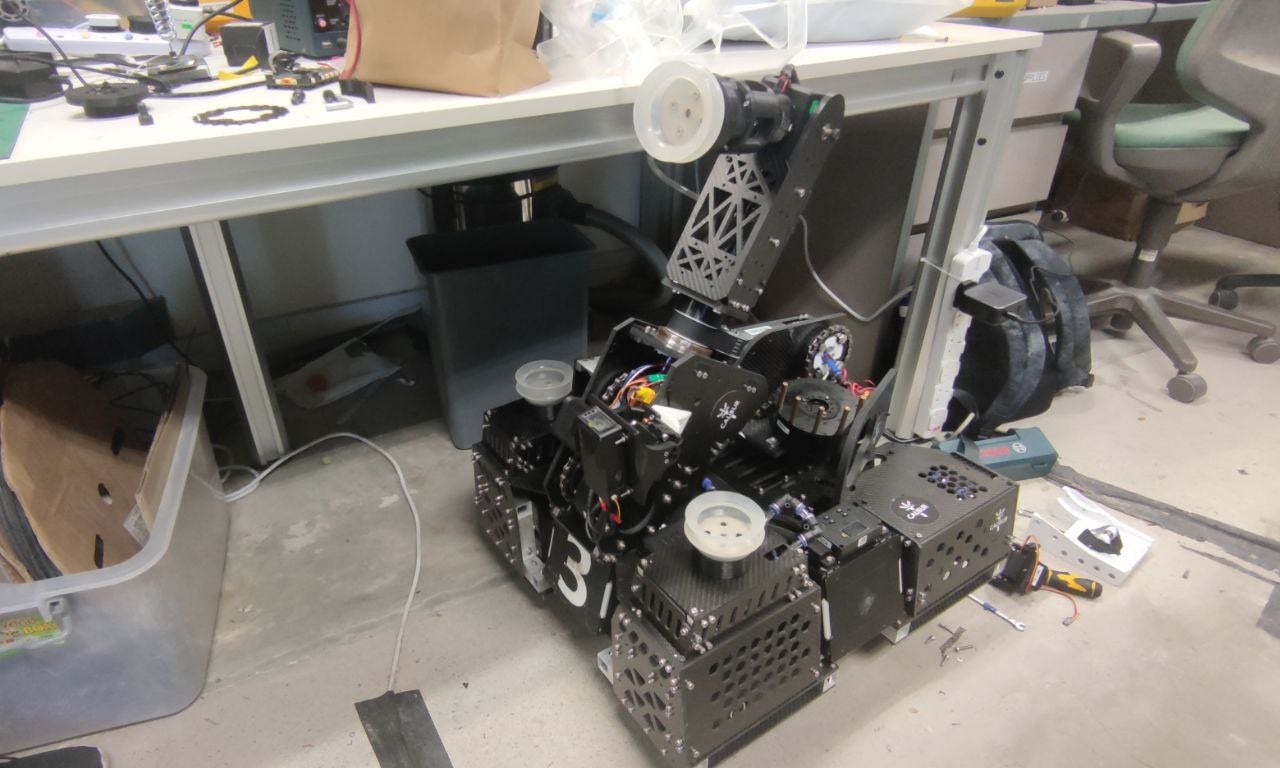 NUS Calibur Robotics is a student-led competitive team at the National University of Singapore, bringing together talent from various disciplines to design, build, and program autonomous combat robots. Established in 2019, the team competes in the prestigious DJI RoboMaster University Championships, showcasing advanced robotics and control systems. Calibur Robotics aims to field a full fleet of seven specialized robots for the global championships in China, continually pushing the boundaries of student-led robotics innovation.
NUS Calibur Robotics is a student-led competitive team at the National University of Singapore, bringing together talent from various disciplines to design, build, and program autonomous combat robots. Established in 2019, the team competes in the prestigious DJI RoboMaster University Championships, showcasing advanced robotics and control systems. Calibur Robotics aims to field a full fleet of seven specialized robots for the global championships in China, continually pushing the boundaries of student-led robotics innovation.
NUS Formula SAE Race Car
 The National University of Singapore Formula SAE (NUS FSAE) team comprises of passionate and talented undergraduates from the NUS Innovation and Design Program. The team designs, builds, tests and race a formula style race car every year to compete in FSAE Michigan, one of the toughest inter-varsity competitions.
The National University of Singapore Formula SAE (NUS FSAE) team comprises of passionate and talented undergraduates from the NUS Innovation and Design Program. The team designs, builds, tests and race a formula style race car every year to compete in FSAE Michigan, one of the toughest inter-varsity competitions.
With a rich history from combustion engines to cutting-edge electric vehicles, their journey has been a testament to relentless dedication, teamwork, and a pursuit of excellence.
NUS Mars Rover
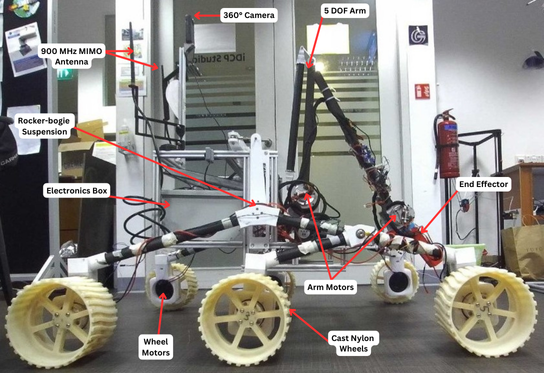 The NUS Mars Rover is a multidisciplinary group of undergraduate students from the NUS Innovation & Design Program. Our mission is to design and build an autonomous Mars rover to compete annually in the University Rover Challenge, held at the Mars Desert Research Station in the USA.
The NUS Mars Rover is a multidisciplinary group of undergraduate students from the NUS Innovation & Design Program. Our mission is to design and build an autonomous Mars rover to compete annually in the University Rover Challenge, held at the Mars Desert Research Station in the USA.