

Mechatronics & Automation Laboratory
The Mechatronics and Automation Laboratory occupies an area of about 350 square meters and was set up in 2000. The laboratory houses a range of automation equipment including static and mobile robots, mechanical actuators, and various control platforms including Programmable Logic Controllers, open-architecture PC-based and embedded control systems. Around 25 full-time research scholars, postdoctoral fellows, research fellows now occupy the laboratory.
The laboratory serves as a teaching laboratory to several undergraduate courses in the area of industrial control systems, robotics, and systems modeling and simulation. It also houses final year projects for full-time BEng students and part-time BTECH Students, and MSc projects for postgraduate MSc students.
Research:
The research of Control Areas is centered on systems and control. The core strengths are on system control methodology, and industrial applications.
The current focus of system control methodology includes adaptive systems, intelligent systems & hybrid systems, robust control, and nonlinear control.
The current focus of industrial applications includes process control for chemical engineering and semiconductor manufacturing systems, precision mechatronics for data storage systems, precision medical systems, unmanned aerial vehicles.
Research Team:
Research Activities
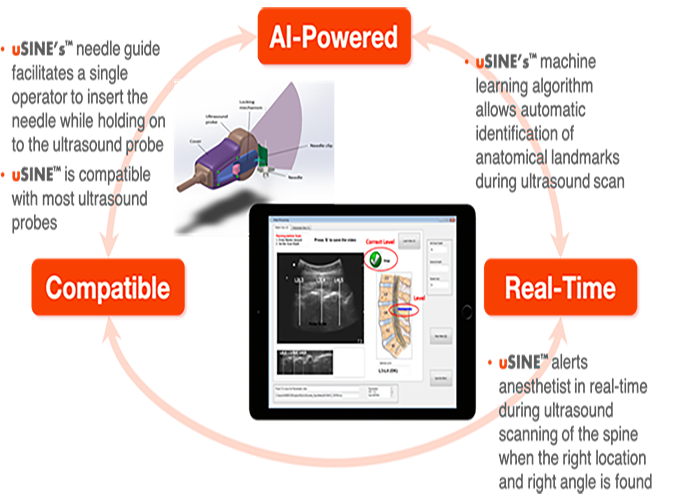
Ultrasound-Guided Spinal Landmark Identification With Needle Navigation System (uSINE)
Epidural anesthesia is the gold standard of pain relief for women in labour. It is also one of the most challenging procedures to perform in anesthesiology for its difficulty in identifying the correct position and angle for needle insertion, especially for obese patients. Multiple needle puncture attempts may be required before anaesthesia can be administered successfully. uSINE is the world’s first AI-powered automated ultrasound-guided spinal landmark identification with needle navigation system. By analysing image streams from an ultrasound machine while the anaesthesiologist is scanning the patient’s spine, uSINE’s software is able to automatically identify the spinal landmarks in real-time and guides the anaesthesiologist to the accurate needle entry spot. uSINE enhances patient care by improving the accuracy and success rate of first attempt needle insertion during lumbar neuraxial procedures.
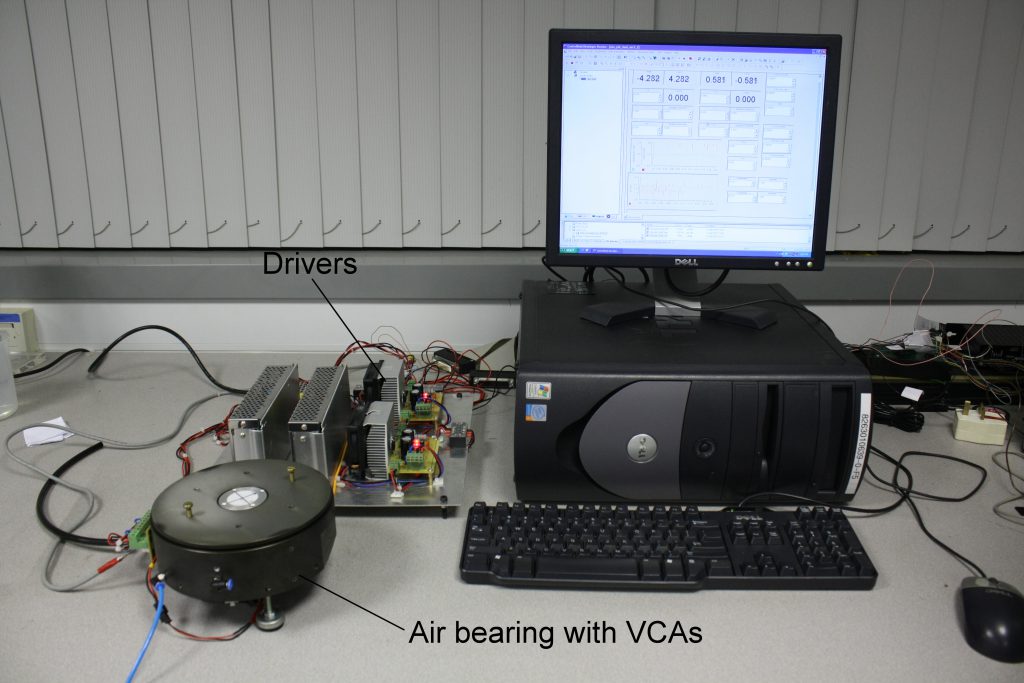
Spherical Air Bearing Positioning System
As the level of automation rises in the modern world, more and more equipment are required to achieve multi-degree-of-freedom motion. Moreover, those motions are also required to be ever smoother, more accurate and flexible. One example of a multi-DOF system is the spherical motor which offers two or three DOF motion (roll, yaw and pitch). These spherical motion systems can be applied to various applications, such as robot joints, manipulators, steering systems, vehicle wheels, machines which require orientation control, medical applications, angular alignment or positioning systems. Spherical Air Bearing Positioning System (SABS) is a high precision multi-DOF system for angular positioning. It combines a direct-drive electromagnetic motor with pneumatic bearing and provides highly precise rotational movements in two-DOF.
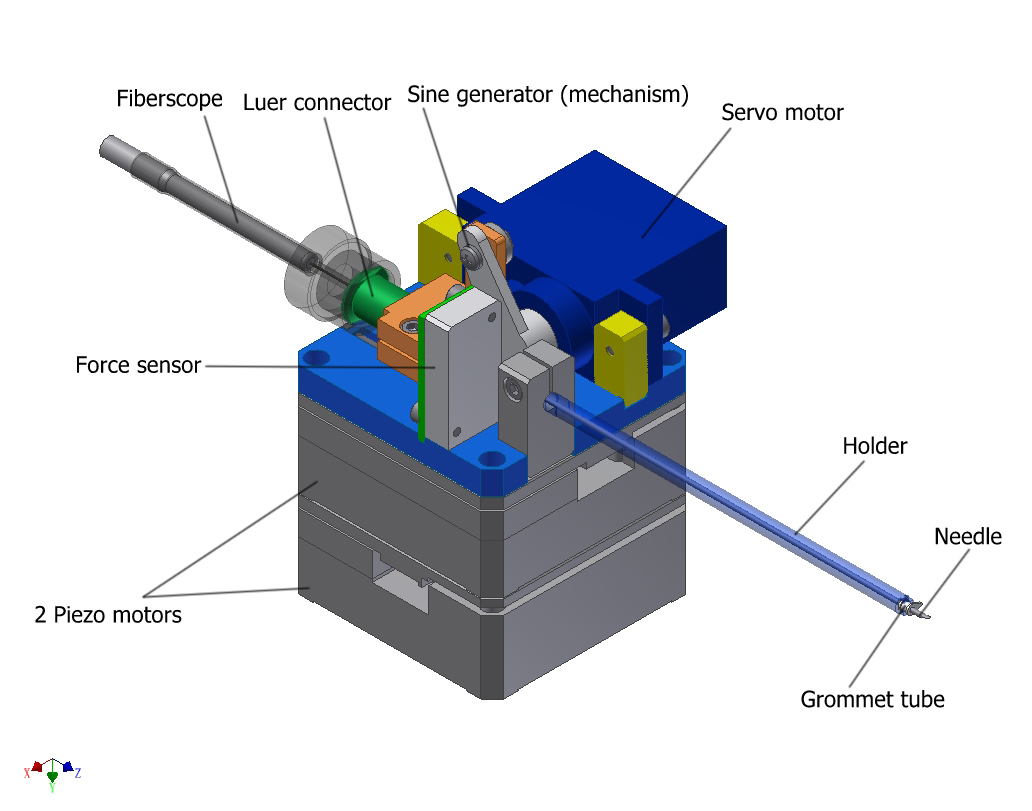
Grommet Insertion Device
Along with the advance of science and technology in the fields of mechatronics and robotics for the past few years, auto or semi-auto surgical instruments and robots are increasingly design and developed to help surgeons and improve the operative success rate. They have advantages of high precision, high speed, repeatability, stability and convenience. Grommet Insertion Device (GID) is a novel all-in-one hand-held device allowing office-based grommet tube insertion in an awake patient for chronic Otitis Media with Effusion (OME). OME is a collection of fluid (generally contains bacteria) that occurs within the middle ear space. The current treatment of OME is to surgically insert an ear ventilation (grommet) tube on the eardrum to bypass the Eustachian tube while medication fails for OME. The designed simple-operation, automation and quick “point, click and insert” device is used to accomplish the procedures of myringotomy and grommet tube insertion, and avoid the disadvantages of the conventional surgery such as general anesthesia and surgery, costly expertise and equipment, and treatment delays. In the device, two ultrasonic piezo motor which is able to provide high precise motions are chosen.
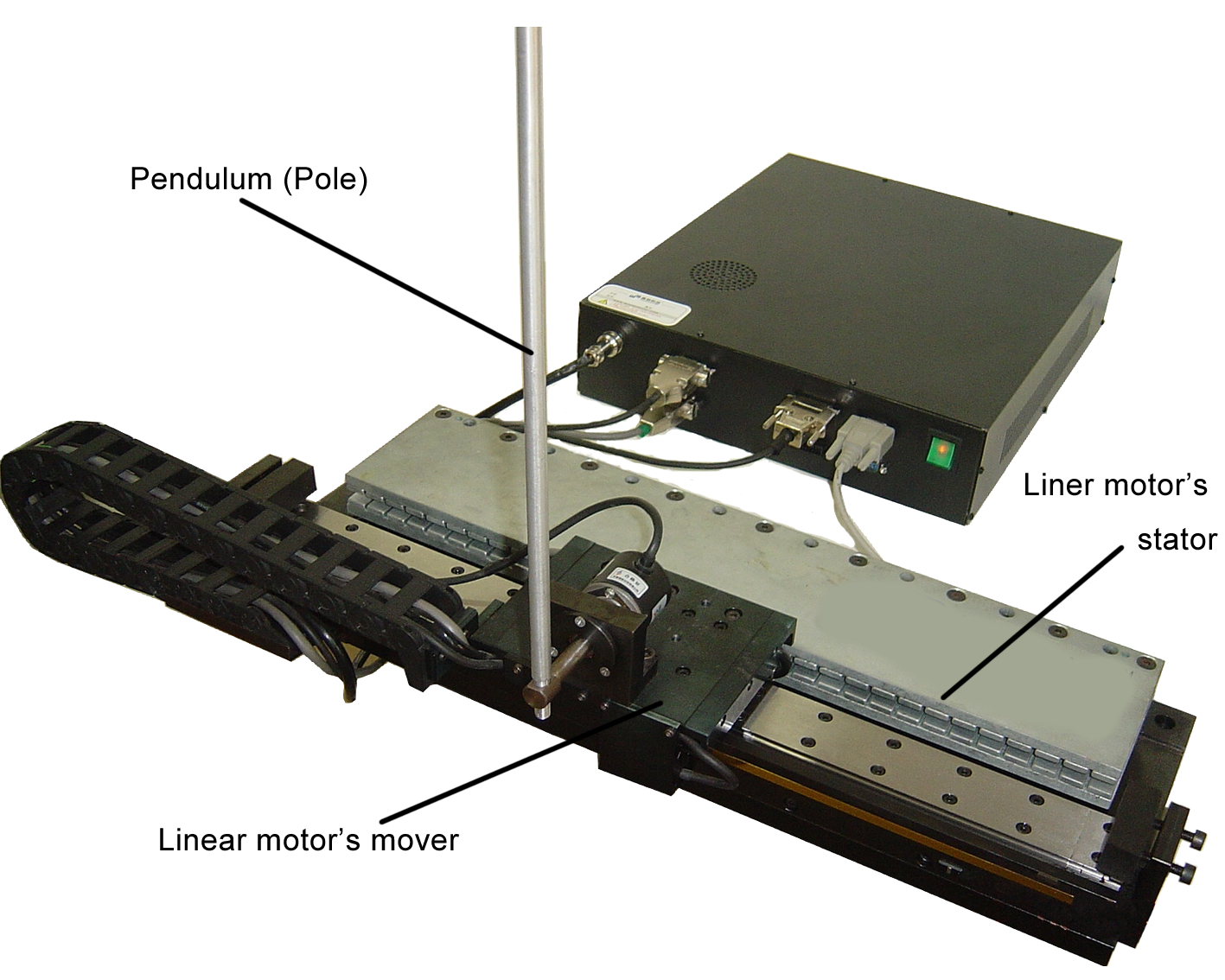
Inverted Pendulum
An inverted pendulum is a pendulum which center of mass is higher than its pivot point (or joint). It is often implemented with the pivot point mounted on a cart that can move horizontally and also be called “a cart and a pole.” As is known to all, a normal pendulum is stable when being hang downwards, therefore an inverted pendulum is inherently unstable, and must be actively balanced in order to remain upright, either by applying a torque at the pivot point or by moving the pivot point horizontally as part of a feedback system. A simple demonstration is achieved by balancing an upturned broomstick on the end of one’s finger. The inverted pendulum is a classic problem in dynamics and control theory and is widely used as a benchmark for testing control algorithms. Linear motor (LM) driven inverted pendulum is driven by an ironless permanent magnet linear synchronous motor. The cart (moving part) of inverted pendulum is directly connected with the LM’s mover. Since LM overcomes the drawbacks of conventional driven motors (servo motor with lead screw or ball screw) such as backlash and slow response, the LM driven inverted pendulum eliminates the disadvantages of conventional inverted pendulum and has better dynamic characteristics and faster response.

Personal Transporter
The personal transporter is a kind of coaxial two-wheel electric vehicle which has the ability to balance itself using control principle of the inverted pendulum. The personal transporter is able to manoeuvre forward or backward when the user lean forward or backwards. For instance, when the transporter is being tilted forward by the user, it will accelerate forward to create an opposing force to bring itself back to equilibrium point. With this balancing act, the user could indirectly control the movement of the personal transporter.
List of Laboratory Experiments:
- ME3243/EE3305 Robotic System Design
- EE4303 Industrial Control Systems
- EE4307 Control Systems Design and Simulation
- EE4308 Autonomous Robot Systems
- EE5110 Special Topics in Automation and Control
- EE5111 Selected Topics in Industrial Control & Instrumentation
Contact & Lab Location:
Block E4A, Level 3, Room 4
3 Engineering Drive 3
National University of Singapore
Singapore 117582
+65 6516 4460