

About ExCEllence (ECE Project Showcase)
The ExCEllence (ECE Project Showcase) is an annual flagship event by NUS ECE. The showcase celebrates the ingenuity, technical depth, and real-world impact of student-driven engineering projects across diverse domains — including artificial intelligence, communications, robotics, microelectronics, energy systems, and emerging interdisciplinary technologies.
Following a successful inaugural run, the 2026 edition returns with an even stronger lineup of projects, broader industry participation, and deeper engagement opportunities.
At its core, ExCEllence is about:
🎯Recognising excellence in student innovation and achievement
🤝Bridging academia and industry through authentic engagement
🚀Inspiring the next generation of engineers to design, build, and lead
Engineering Intelligence!
What to Expect at ExCEllence 2026

🔬 Live Demonstrations

📊 Poster Presentations

🏆 Awards & Recognition
Know an outstanding project that deserves recognition?
Whether it’s a Capstone project, a course-based innovation, or an award-winning competition entry, we want to spotlight the very best work from our ECE students.
📌 Who can nominate? Students and faculty members
📌 What are we looking for? Innovative, impactful, and well-executed projects
📌 Why nominate? Give deserving projects the spotlight and inspire the ECE community!
🌟Selected projects stand a chance to win attractive prizes. Find out more about the eligibility and the prizes/awards details.
🌟Submit your nominations today and help us showcase the best of ECE!
Find out more about the eligibility for the competition.
Experience ExCEllence!
Discover bold ideas. Meet future engineers. Celebrate innovation in action.
Explore cutting-edge ECE projects, engage with industry professionals, and witness students competing for top honours.
Be Part of the Excitement!
✅ Explore breakthrough innovations
✅ Vote for the Most Inspiring, Most Impactful, and Most Sustainable projects (note: Student-Run Teams are not eligible to participate)
✅ Support outstanding student achievements
✅ Stand a chance to win attractive prizes as a voter
👉 RSVP by 8 April: https://forms.cloud.microsoft/r/Hm0hSKCmuv
Categories
Competitive

Capstone Posters

Espressif Projects

EE/CEG Courses Projects

MSc Projects
Non-Competitive

External Competition Projects

Knowledge Sharing Projects

Student-Run Team Projects
Capstone Posters
-
The evaluation criteria include the clarity and design of your poster, the overall impact of your work, your presentation skills, etc.

A Low Cost Intuitive Robot Arm Teleoperation Framework

Advanced LEGO Robotics Platform

AI/ML-Driven Fault Detection and Diagnosis in Multi-Level Three-phase Inverter Topologies

Autonomous Vehicle (AV) Perception Systems: Reviewed and Reengineered

Biofeedback and Freezing of Gait Detection for Parkinson’s Disease
This project developed a wearable Edge-AI system for real-time detection and biofeedback of Freezing of Gait in patients with Parkinson’s Disease. Motion sensors worn on the ankles monitor a patient’s gait to detect Freezing of Gait using on-device machine learning, and alert them to stop to prevent falls. Subsequently, left and right cues are provided to assist the patient in resuming walking. To improve the reliability of Freezing of Gait detection, the device uses a patient-independent model, and transitions to a patient-dependent model as more Freezing of Gait episodes are detected.

Design of a Redundant Inertial Navigation System with Hardware-Level Voting and Sensor Fusion for Autonomous Platforms

Federated Domain Adaptation for Video Action Recognition
High Speed Image Processing on FPGA Using Convolutional Neural Network (CNN)

Human Detection and Tracking in Indoor Spaces Using Nano Drones
In the aftermath of disasters such as earthquakes, rapid and efficient search and rescue operations are critical for saving lives and minimizing casualties. Traditional methods often face significant challenges in navigating dangerous, complex and unstable environments, such as partially collapsed buildings, where visibility and access are severely restricted. The recent and rapid advancement of drone technology has unlocked new possibilities for such applications.
The project aims to develop a thermal-based approach to search for and track humans in indoor environments. This work integrates thermal sensors and develops algorithms that enable palm-sized nano Crazyflie drones, despite their limited computing and sensing capabilities, to autonomously search for, detect, and track humans in indoor environments while avoiding simple obstacles such as walls.

Investigating Ultra-Low Power, Brain-Inspired, Neuromorphic Hardware to Detect Interference Patterns on Board Satellites

Multi-Layered Anatomical Hand Model for Physics-Based Interaction

Near-Infrared Transmission-Control Mechanism of Metasurface Arrays on Novel Substrate Materials

Non-Invasive Monitoring of Implantable Battery Using Ultrasonics and AI

Passive Acoustic Monitoring of Melting Glaciers

Real-Time Underwater Voice Communication

Self-Balancing Control System for Spacecraft Simulator

Self-Sustaining Communication Module for Enhanced Resilience in Miniaturized Satellite Operations

Study of a Non-Iterative Method Using Phaseless Data for Solving Inverse Scattering Problems

Systematic RF Hardware Design Methodology for TEMPEST Attacks Based on Display Pixel Harmonics

Terrain Aware SE(2) Planning for Multifloor Navigation in Indoor Digital Twins
The work builds on the SEB Naver framework as a baseline local planner and examines how raw point cloud data can be converted into an SE(2) terrain representation containing elevation, surface normal, risk, and signed distance information. On this representation, local motion planning is performed using Kino A* and trajectory optimisation. To extend this framework beyond a single floor, this report proposes a higher level multifloor planning approach in which each floor is represented by its own terrain map and vertical connections such as elevators or ramps are modelled as transitions in a graph. Global planning is then carried out by combining inter-floor graph search with floor level SE(2) planning.
Espressif Competition
This category features selected Capstone projects developed in collaboration with Espressif Systems, showcasing innovative applications built using Espressif technologies.
Participation in this category is by invitation only and is limited to Capstone teams whose projects are part of the Espressif collaboration programme.
- The showcase features presentations and live demonstrations of the prototypes or the completed systems.
- The evaluation criteria assess the understanding of, and ability to apply, fundamental engineering principles in solving real-world problems, creativity in design and execution, among other things.

Biofeedback and Freezing of Gait Detection for Parkinson’s Disease
Centralized & Distributed Object Detection using Autonomous Vehicles on any Unknown Terrain using Machine Learning
Human Detection and Tracking in Indoor Spaces Using Nano Drones
The project aims to develop a thermal-based approach to search for and track humans in indoor environments. This work integrates thermal sensors and develops algorithms that enable palm-sized nano Crazyflie drones, despite their limited computing and sensing capabilities, to autonomously search for, detect, and track humans in indoor environments while avoiding simple obstacles such as walls.

Personal Smart Companion (PSC)
Smart Traffic Cone System
EE/CEG Courses Projects
-
The showcase should ideally include a live demonstration of the system.
-
The evaluation criteria assess the understanding of, and ability to apply, fundamental engineering principles in solving real-world problems, creativity in design and execution, etc.
-
A printed or displayed visual aid is optional. If included, it will serve only to aid in the explanation and will not be evaluated.

CDE2605R - Live Video from Stratospheric Weather Balloon

CG2028 - LIFT (Live Intelligent Fall Tracker)

CG2111A - Alex Rover

CG2111A - Moonbase SG Rescue Mission (Alex)

CG3207 - Dual-Core Pipelined RISC-V Processor with Atomic Instruction Support
This project presents the design and implementation of an dual-core, 5-stage pipelined processor implementing the RV32IM ISA, written in Verilog and tested on the Nexys 4 FPGA. Each core can run its own program, allowing for high thread-level parallelism. To share memory and peripherals between cores while avoiding race conditions, we implemented atomic Load-Reserved/Store-Conditional instructions to enable synchronization primitives such as mutexes to be used in the programs. To demonstrate its utility, we present a rendering demo (moving ball) where each core draws different halves of the screen, sharing variables and a memory-mapped VGA peripheral.
Other enhancements include hazard detection to automatically stall/flush pipeline stages when needed, data forwarding to avoid pipeline stalls where possible, global history-based branch prediction scheme for better speculative execution, and a Karatsuba multiplier for fast and efficient 32b multiplication.

CG3207 - In-Order Dual-Issue RISC-V32IM Processor on FPGA with CoreMark Benchmarking
This project presents the design and implementation of a processor based on the RV32IM ISA. The processor is developed using Verilog and prototyped on a Nexys 4 FPGA. It supports execution of compiled assembly programs in binary format.
To improve performance, the processor incorporates a dual-issue in-order execution pipeline with a 5-stage architecture, allowing two instructions to be issued simultaneously. Key enhancements include a hazard detection, data forwarding, and branch prediction, all designed to mitigate pipeline stalls and improve throughput.
The performance is evaluated using the CoreMark benchmark and achieves a score of 2.22 CoreMark/MHz.

CG3207 - Mach-V: In-order SuperScalar RISC-V CPU Implementation on Nexys 4 FPGA

CG4002 - PokemonAR

EE1111A - Design of Off-Grid Solar Panel Array with Suntracking for Jakarta

EE1111A - OrbitGrow: An Automated Rotary Hydroponic System with Adaptive Nutrient Dosing

FPGA-Based Guitar Multi-Effect Pedal

EE2026 - Metacircuit

EE2026 - Object Tracker with FPGA

EE4218 - FPGA-Based Hardware Accelerator for Ternary Transformer Sentence Sentiment Analysis
This project designs and implements hardware co-processors to accelerate a ternary Transformer for sentence sentiment analysis on the KV260 FPGA. Modules include a projection engine for Q/K/V/O layers and a score engine for attention computation.
The accelerators interface with the on-board CPU via AXI and AXI-Stream. Two implementations are explored: Verilog HDL and HLS (C/C++), both integrated with software. The model supports sentiment and topic classification (Sports, Business, Sci/Tech, World), with a Python software version used as a performance baseline.
This work demonstrates FPGA acceleration of Transformer models and trade-offs between HDL and HLS.

EE4218 - Hardware Accelerated Inference Of Satellite Imagery On FPGA's

EE4218 - Hardware Acceleration of a Lightweight YOLO Implementation on an FPGA-based SoC

EE4218 - Verilog Neural Network (VNN): Hardware Acceleration of Basic Image Classifier
In this project, we develop a custom hardware accelerator to improve the speed of an image classification system.
Our approach uses a Convolutional Neural Network (CNN) trained on the CIFAR-10 dataset to recognize objects such as animals and vehicles. With an innovative and highly efficient RTL microarchitecture optimized using various RTL transformation techniques, our RTL implementation achieves a 2709× speedup (8127 images/sec), while the HLS implementation delivers a 585× speedup (1705 images/sec) compared to CPU-only execution (3 images/sec) on the KV260 platform.
Through this work, we demonstrate how specialized hardware can accelerate machine learning workloads and offer advantages over traditional software-based solutions.
MSc Projects
-
The showcase should ideally include a live demonstration of the system.
-
The evaluation criteria include technical complexity and depth, ingenuity, the broader implication of the project, presentation skills, etc.
-
A printed or displayed visual aid is optional. If included, it will serve only to aid in the explanation and will not be evaluated.

FPGA-Accelerated NAND Flash Controller with Parallel LDPC-Based Error Correction
External Competition Projects
Discover ECE students’ outstanding achievements in competitions beyond NUS!
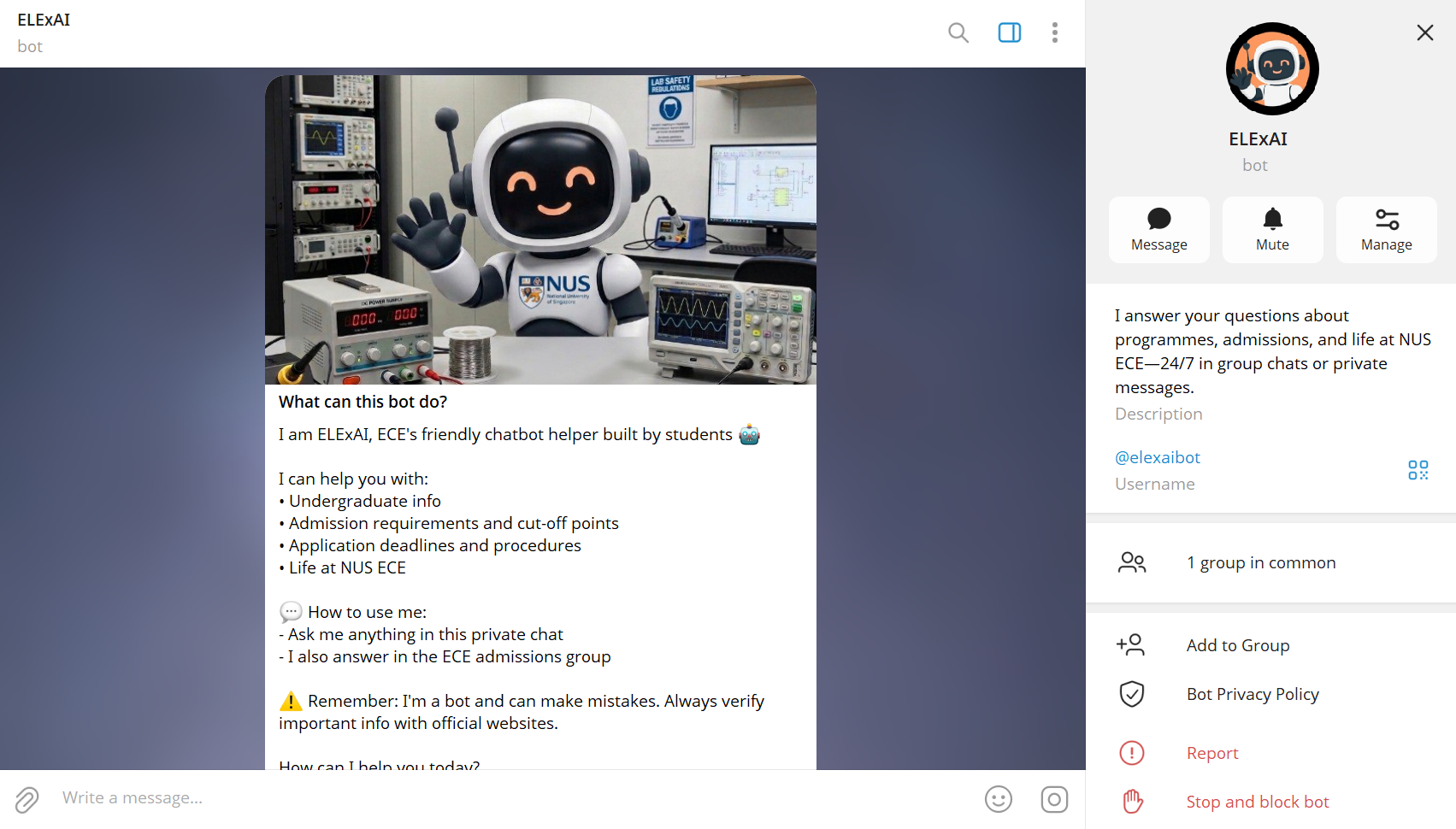
Knowledge Sharing Projects
ELExAI Chatbot
Student-Run Team
Explore existing student-led project teams
NUS Bumblebee
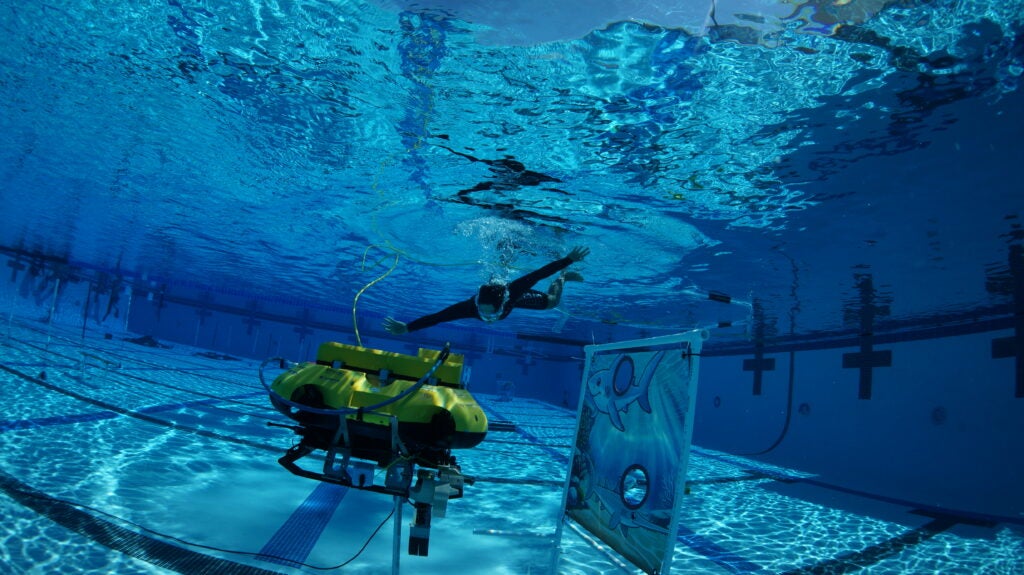 Bumblebee is a student-run, multi-disciplinary robotics team. The Bumblebee team designs and builds Autonomous Underwater Vehicles (AUVs) and Autonomous Surface Vessels (ASVs) to navigate across oceans independently, from the shore line and the water surface, to deep waters.
Bumblebee is a student-run, multi-disciplinary robotics team. The Bumblebee team designs and builds Autonomous Underwater Vehicles (AUVs) and Autonomous Surface Vessels (ASVs) to navigate across oceans independently, from the shore line and the water surface, to deep waters.
NUS Calibur Robotics
 NUS Calibur Robotics is a student-led competitive team at the National University of Singapore, bringing together talent from various disciplines to design, build, and program autonomous combat robots. Established in 2019, the team competes in the prestigious DJI RoboMaster University Championships, showcasing advanced robotics and control systems. Calibur Robotics aims to field a full fleet of seven specialized robots for the global championships in China, continually pushing the boundaries of student-led robotics innovation.
NUS Calibur Robotics is a student-led competitive team at the National University of Singapore, bringing together talent from various disciplines to design, build, and program autonomous combat robots. Established in 2019, the team competes in the prestigious DJI RoboMaster University Championships, showcasing advanced robotics and control systems. Calibur Robotics aims to field a full fleet of seven specialized robots for the global championships in China, continually pushing the boundaries of student-led robotics innovation.
NUS Formula SAE Race Car
 The National University of Singapore Formula SAE (NUS FSAE) team comprises of passionate and talented undergraduates from the NUS Innovation and Design Program. The team designs, builds, tests and race a formula style race car every year to compete in FSAE Michigan, one of the toughest inter-varsity competitions.
The National University of Singapore Formula SAE (NUS FSAE) team comprises of passionate and talented undergraduates from the NUS Innovation and Design Program. The team designs, builds, tests and race a formula style race car every year to compete in FSAE Michigan, one of the toughest inter-varsity competitions.
With a rich history from combustion engines to cutting-edge electric vehicles, their journey has been a testament to relentless dedication, teamwork, and a pursuit of excellence.
NUS Mars Rover
 The NUS Mars Rover is a multidisciplinary group of undergraduate students from the NUS Innovation & Design Program. Our mission is to design and build an autonomous Mars rover to compete annually in the University Rover Challenge, held at the Mars Desert Research Station in the USA.
The NUS Mars Rover is a multidisciplinary group of undergraduate students from the NUS Innovation & Design Program. Our mission is to design and build an autonomous Mars rover to compete annually in the University Rover Challenge, held at the Mars Desert Research Station in the USA.
Judges

A/Prof Tham Chen Khong

Dr Lee Jun Wei

Dr Abhishek Rai

Mr Wong Jit Chin
Judges for Espressif Competition

Mr Junius Pun

Mr Yogesh Mantri

Dr Tang Kok Zuea
