World’s First 100% Solar Powered Quadcopter
Team Bumblebee is a student-run, multi-disciplinary robotics team that consists of students from the Department of Electrical and Computer Engineering, Department of Mechanical Engineering and School of Computing. For the past six years, the team has been building Autonomous Underwater Vehicles (AUVs) to compete in competitions against world-class teams around the globe. The team then moved on to developing Autonomous Surface Vehicles (ASV) for the Maritime RobotX Competition, and are now focusing on multi-platform integration between the AUV and ASV.

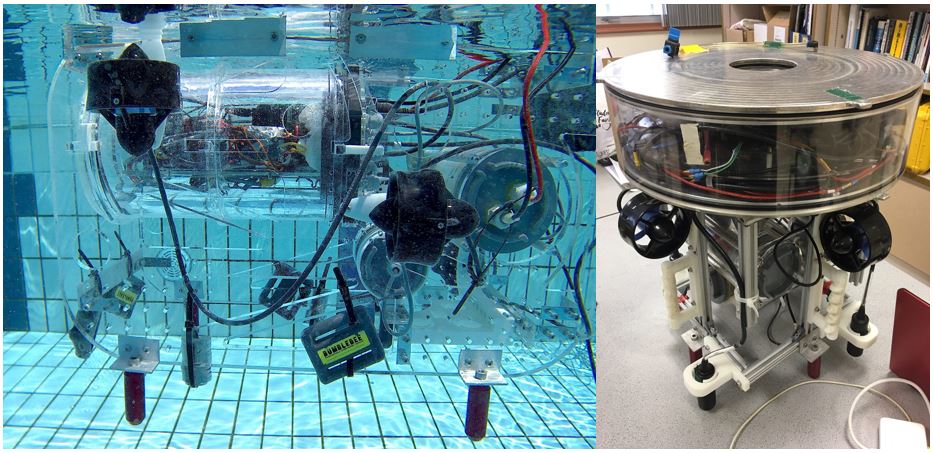
(Right) Bumblebee Autonomous Underwater Vehicle 3.5 (BBAUV 3.5)
The AUVs and ASVs developed by Team Bumblebee are capable of performing navigation and mapping, object perception and tracking, and autonomous manipulation.
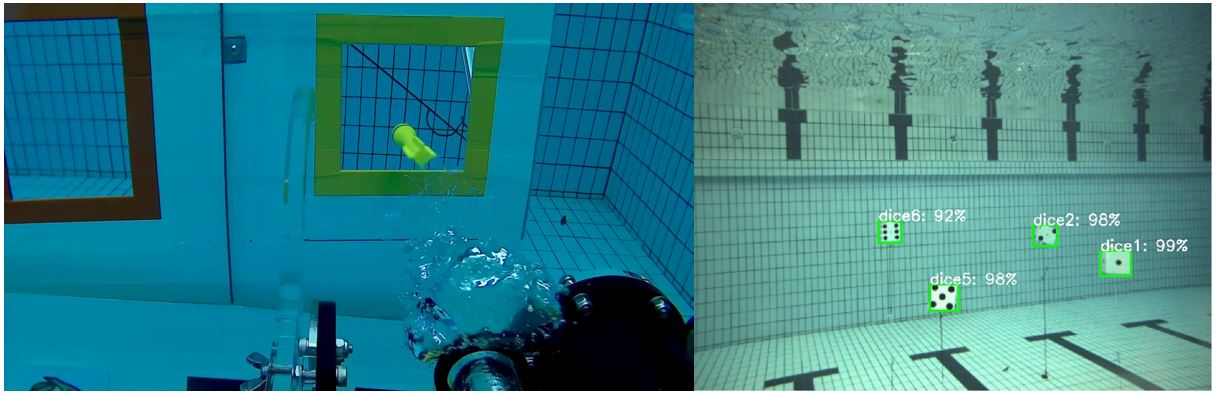
As part of the development process, the team conducts pool tests and sea trials to test our platforms in real-world conditions, in murky waters and against choppy sea waters.

The team came in 2nd Place at the 2018 International Robosub Competition, held in San Diego, USA, from July 30 to August 5, 2018. In December 2018, the team competed in the 2018 Maritime RobotX Challenge held in Oahu, Hawaii, with the AUV-ASV system they have been developing over the past two years.
The team grooms new talent each year by placing new members through our Hornet training programme, where they learn the complexities of an AUV, as they are tasked to build a low-cost AUV to participate in the Singapore AUV Challenge (SAUVC).